


Новые технологии появляются с увеличивающейся частотой. В системах вождения теперь применяются инерционные датчики, ультразвуковые локаторы, системы компьютерного видения, спутниковые системы позиционирования и т. д. Все эти высокие «чудеса техники» делаются с одной простой земной целью — обеспечить прохождение трактора с навесным агрегатом по полю так, чтобы каждая последующая полоса ложилась точно по краю предыдущей полосы, без пропусков и перекрытий. Исходя из этого, можно сформулировать основной постулат: хотите двигаться по пути к экономии — езжайте прямо!
В действительности, вы нигде не увидите идеального рисунка обработки поля. Обычно это получается следующим образом.

Какой бы ни был тракторист мастер-виртуоз, неизбежны огрехи. На первый взгляд — ничего страшного; и так сгодится, тут вильнул в сторону, пропустил немного, оставил участок незасеянной земли, но вовремя заметил, быстро выровнялся и, чтобы пропускать поменьше, решил, пусть лучше у меня загонка с загонкой немного перекрываться будет. В результате, там, где перекрываются ряды, будет всыпано вдвое больше семенного материала и удобрений. Возможно, от этого, местами, и урожай получится лучше, а вот где пропущено, там сорняки будут хорошо расти, давить соседние ростки, понижать сортность зерна при уборке. Поэтому пропуски часто приходится пересевать.
К чему приводит это «и так сгодится», можно показать на простейшем примере. Для расчета возьмем идеальное поле площадью 100 га в форме квадрата со стороной 1 км и засеем его пшеницей, используя современную широкозахватную сеялку шириной 18 м. Страхуясь от пропусков, тракторист будет перекрывать предыдущий ряд, гарантированно обеспечивая перерасход посевного материала и удобрений.
Зная нормы высева пшеницы и внесения удобрений, а также их закупочную цену, можно легко посчитать, сколько мы переплачиваем за неточности вождения. Небольшие, на первый взгляд, цифры перерасхода на каждой загонке приводят в маштабах хозяйства к весьма заметным суммам, подтверждающим рекламную фразу: «Системы параллельного вождения окупаются за один-два сезона». Не приводя общие формулы, представим в таблице результаты расчетов при различных величинах перекрытия соседних рядов. Любители арифметики смогут легко выполнить эти расчеты самостоятельно.
Результаты расчетов при различных величинах перекрытия соседних рядов
| Ширина перекрытия, м | Реальная ширина захвата, м |
Площадь перекрытия на одном гоне, га |
Кол-во гонов | Общая площадь перекрытия на поле, га |
Перерасход на семена и удобрения, руб./га |
| 0,2 | 17,8 | 0,02 | 56 | 1,1 | 19,7 |
| 0,4 | 17,6 | 0,04 | 57 | 2,3 | 39,8 |
| 0.6 | 17,4 | 0,06 | 57 | 3,4 | 60,3 |
| 0.8 | 17,2 | 0,08 | 58 | 4,7 | 81,4 |
| 1.0 | 17,0 | 0,1 | 59 | 5,9 | 102,9 |
Для расчетов приняты следующие данные:
В итоге получилась простая зависимость: каждые 20 сантиметров перекрытия соседних рядов — это 20 рублей убытков на каждый гектар обрабатываемой площади только на одной операции — посевной.
Далее — еще проще. Пусть в вашем хозяйстве 5000 га обрабатываемой земли, и вы сумели при проведении сева сократить ширину перекрытия соседних рядов с 80 см (вполне реальная цифра!) до 20 см (что позволяют сделать практически все системы спутниковой навигации). В результате вы сэкономили 300000 (триста тысяч!) рублей.
Как же обеспечить требуемую траекторию движения трактора по полю? Существуют различные решения:
— полностью полагаться на мастерство и зоркий глаз тракториста;
— отправлять помощника бегать по полю и ставить вешки, на которые тракторист будет ориентироваться;
— метить ряды с помощью пенных маркеров;
— использовать для навигации глобальную спутниковую систему определения координат (GPS).
Что дает GPS-навигация?
Фрагменты космических снимков полей,
обработанных с использованием систем спутниковой навигации

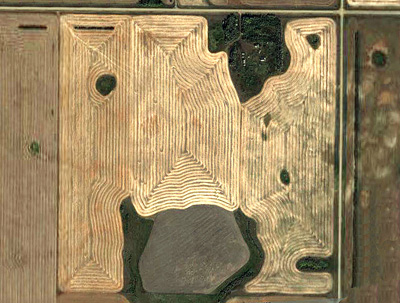
Варианты обработки полей с помощью систем навигации
|
Базовый режим — загонки, параллельные базовой прямой АВ |
«Адаптивная кривая» — каждая последующая загонка повторяет предыдущую |
|
|
|
| «Идентичная кривая» — все последующие загонки повторяют начальную кривую АВ |
Предварительная обработка разворотных зон по контуру (линия 1-2), с последующей обработкой поля загонками, параллельными базовой прямой (линия 3-4) |
|
|
|






