

-
 КОСМОС - СЕЛЬСКОМУ ХОЗЯЙСТВУОсвоение космического пространства, подготовленное трудами К.Э. Циолковского, Ф.А. Цандера, Г. Оберта и других ученых, началось в октябре 1957 года с запуска в СССР первого искусственного спутника Земли (ИСЗ) и полета Ю.А. Гагарина в апреле 1961 года. За прошедшие с этих исторических дат годы существенно изменились цели полетов в космос: достижения первых лет (выход в открытый космос, стыковка КА, длительное пребывание человека в космосе и др.) уступили место применению космических средств для решения конкретных задач в интересах науки и «земной» деятельности человечества. Современное сельское хозяйство является одной из отраслей, в которой использование наземно-космических средств и предоставляемых ими сервисов не только весьма полезно, но, зачастую, просто необходимо. В качестве подтверждения этого тезиса, далее будут рассмотрены состояние и основные перспективы развития темы «Космос - сельскому хозяйству». Связь Надежная телефонная связь всегда была важна для управления сельскохозяйственным предприятием, хотя она и не решала проблему оперативного обмена информацией со специалистами, работающими в полях. Для этого использовались проводные каналы связи (телефон, факс), а также компактные радиостанции, дальность действия которых не превышала нескольких километров при, как правило, низком качестве связи. Все изменилось с появлением мобильной связи и Интернета. С их развитием стало возможным решение ряда важных и актуальных для аграрного сектора задач: оперативная мобильная связь всех сотрудников предприятия, обеспечивающая общение голосом, передачу изображений, цифровых массивов и т.п.; наличие голосовой связи способствует организации постоянного контроля, либо, при необходимости, корректировки выполняемых работниками предприятия производственных заданий; возможность передачи цифровых массивов (изображений, видео и т.п.) позволяет кардинально изменить работу агрономов и агрономической службы хозяйства в целом. Сегодня агроном, обследующий состояние посевов, может сделать своим мобильным телефоном фото проблемных (засоренность сорняками, поражения болезнями, грызунами, насекомыми и др.) участков и немедленно отправить их по GSM в стационарный офис для анализа и принятия решения по технологии обработки таких зон; контроль в реальном времени местонахождения и функционирования сельскохозяйственных машин, а также любых других подвижных объектов; дистанционный сбор данных с собственных метеостанций и иных стационарных полевых измерительных устройств. В качестве примера, рассмотрим более подробно работу современного агронома в полевых условиях. И ранее, и сегодня задача агронома одна и та же: определить текущее состояние посевов, либо их отдельных участков, сравнить с планировавшимся на данный момент, определить отклонения (сорняки, повреждения грызунами, болезнями, угнетение из-за недостатка влаги и т.д.); определить наиболее эффективные меры воздействия (обработка гербицидами, внесение удобрений, полив и т.п.), восстанавливающие нормальное развитие культурных растений; реализовать эти меры путём проведения соответствующих полевых операций (опрыскивание, внесение в почву, полив и т.д.). Периодическое повторение перечисленных действий обеспечит развитие культурных растений по сценарию, наиболее близкому к расчетному. Нетрудно видеть, что, если отвлечься от предметной области - растениеводства, фактически описана классическая схема работы системы управления с обратной связью: измерение контролируемых параметров работы некой системы; определение их отклонений от расчетных; выбор и реализация управляющих воздействий, устраняющих отклонения; повторение цикла «измерение - расчет отклонения - устранение отклонения». Данная аналогия несет в себе вполне практический смысл. Она позволяет структурировать и формализовать работу агрономической службы сельскохозяйственного предприятия и постепенно максимально автоматизировать ее работу. Конкретно это выглядит следующим образом. Агроном, обнаружив при проведении полевых осмотров проблемный участок в посевах, делает своим мобильным телефоном несколько его фотографий. Затем он в ручном , либо автоматическом режиме идентифицирует причину повреждения посевов, например, определив по загруженному в его телефон справочнику сорных растений, какой конкретно это сорняк (название) и какие меры его устранения (вид гербицида, доза и сроки внесения на единицу площади и др.) Рекомендуемый вариант агроном пересылает в агрономическую службу непосредственно с поля, либо после возвращения на свое рабочее место представляет руководству агрономической службы полную информацию: координаты и размеры проблемных участков, причина повреждения, рекомендуемые меры по их устранению. Важно отметить, что самый трудоемкий этап-мониторинг состояния посевов и выявление проблемных участков-на сегодняшний день успешно выполняется с помощью беспилотных летательных аппаратов (БЛА) самолетного, либо вертолетного типа. Эти аппараты могут за день обследовать большие площади посевов, не повреждая их передвижением по ним. Описанная технология позволяет существенно повысить качество работы и производительность агрономических служб. При этом квалификация конкретного агронома перестает играть решающее значение, поскольку его функции ограничиваются съемкой на телефон, работой с электронным справочником и пересылкой всей информации в стационарный офис. С учётом довольно острой нехватки высококвалифицированных агрономов это обстоятельство имеет важное значение для многих, особенно малых и средних, растениеводческих предприятий России. В настоящее время и связь, и Интернет практически полностью базируются на наземных средствах коммуникации, проводных и беспроводных. Поэтому во многих хозяйствах, особенно расположенных в отдаленных районах, Интернет, а нередко и мобильная связь, отсутствует в полях. Это резко обесценивает применение в аграрном секторе уже имеющихся цифровых технологий и их дальнейшее развитие. Существующие спутниковые системы связи (Гонец, Иридиум, Globalnet и др.) позволяют находящимся на Земле пользователям общаться голосом, либо передавать текстовые сообщения практически из любой точки Земли. К сожалению, скорость обмена данными по ним измеряются всего несколькими десятками Кбит/с, что достаточно только для экстренных сообщений, коротких текстов и IoT. В последние годы бурно развиваются космические средства связи, обеспечивающие покрытие высокоскоростным Интернетом всей поверхности Земли. Это-уже находящаяся в эксплуатации первая очередь группировки КА связи Starlink [1], насчитывающая по состоянию на апрель 2023 года ~4300 КА со скоростью обмена данными «КА связи-наземный терминал» примерно 80-100 Мбит/с (рис. 1). Недавно в России началась реализация масштабного проекта «Сфера» (рис. 2) по завершению которого на околоземной орбите будет находиться несколько сотен КА, часть из которых будут связными, а остальные - проводить съемку поверхности Земли. Основанные на группировках малых КА, насчитывающих сотни-тысячи аппаратов, и малогабаритных мобильных наземных терминалах, эти технологии в ближайшие годы произведут очередную «техническую революции» в связи, в том числе, и в ее роли в цифровизации сельского хозяйства. Рисунок 1 - Схема спутниковой сети Starlink (ЦУС/NMS - Центр Управления Сетью/Network Management System; PoP – Point of Presence - узлы Google; ВОЛС – волоконно-оптическая линия связи, арендованная у наземного оператора, для передачи команд управления) Рисунок 2 – Предполагаемые области применения спутниковой сети «Сфера» Навигация Все отрасли, связанные с работой и перемещением на местности, либо в пространстве, нуждаются в координатной привязке стационарных и подвижных объектов. Это относится к судоходству, авиации, автомобильному транспорту и многим другим отраслям. Очевидно, что агропромышленный комплекс, в первую очередь растениеводство, также входит в их число. Всего лишь несколько десятков лет назад о полноценном решении этой задачи в интересах сельского хозяйства не могло быть и речи. Все ограничивалось проведением наземной геодезической съемки, обеспечивающей определение границ полей при межевании и для земельного кадастра. Причем измерения сохранялись в местной, используемой только для данной территории, системе координат, переход от которой к мировым системам координат был невозможен без наличия доступу к сведениям об их взаимоположении. Первые спутниковые системы позиционирования и навигации появились на рубеже 70-х и 80-х годов прошлого века. Состояли они из двух сегментов- космического и наземного. Космический сегмент — это группировка КА, расположенных на орбитах таким образом, чтобы в любой момент времени в заданном районе либо в произвольной точке поверхности Земли были видны минимум 4 КА. Для обеспечения координатной привязки и навигации в отдельном районе Земли достаточно 7-10 КА, а для всей поверхности Земли - около 20 и более. Локальные системы, обслуживающие только заданную территорию, как правило, одну страну, создают Индия, Япония и ряд других стран. Глобальными системами, обслуживающими десятки стран мира, являются: ГЛОНАСС (Россия, 24 КА и 2 резервных); GPS (США, 24 КА и 8 резервных); Beidow (Китай, 35 КА и 13 резервных); Galileo (Европа, 23 КА). В России наиболее широко используются две системы, ГЛОНАСС и GPS. У каждой из них есть свои преимущества и недостатки. Основных отличий два: точность определения положения объектов на поверхности Земли в системе ГЛОНАСС составляет 4-6 метров, а в GPS 2-4 метра; ГЛОНАСС обеспечивает более устойчивую работу и высокую точность в полярных районах Земли, что достигается расположением плоскостей орбит КА на больших чем в системе GPS углах наклона этих плоскостей к плоскости экватора. Как показывает опыт их практического применения, наиболее эффективно одновременное использования обеих систем. Поэтому большинство современных навигационных приемников являются двухсистемными. Точность определения координат объекта на поверхности Земли зависит от ряда условий, основными из которых являются следующие: - количество навигационных КА ( не менее 4-х), одновременно находящихся на связи с установленным на объекте приемником их сигналов; помимо количества таких КА, большое влияние на точность оказывает также их взаиморасположение, что можно пояснить на простом примере-для определения расстояния до какого-либо объекта, размеры которого неизвестны, человек должен видеть его одновременно двумя глазами, поэтому если расстояние между двумя или более КА малы, погрешность будет выше; информация от навигационных спутников поступает непосредственно в наземный приемник и используется в режиме реального времени; в этом случае точности определения координат составляют, как указано выше, несколько метров; в определении текущих координат подвижного объекта участвует стационарная базовая станция, находящаяся на связи с объектом и в реальном времени передающая на его навигационный приемник корректирующие поправки , повышающие точность вплоть до единиц сантиметров, при условии, что расстояние между базовой станцией и объектом невелико ( до нескольких десятков километров);такие же поправки могут передавать через спутник связи от базовой станции , расположенной на любом расстоянии от объекта, но точность падает при его увеличении и составляет десятки сантиметров; скорость передвижения объекта (не имеет большого значения для сельского хозяйства, поскольку скорости перемещения сельскохозяйственных и прочих машин не оказывают заметного влияния на точность). Появление спутниковых систем произвело в буквальном смысле переворот в сельском хозяйстве. Стало возможным решение многих важных производственных задач, среди которых наиболее приоритетными являются следующие. Создание многослойных электронных карт полей и других сельскохозяйственных угодий Многослойная электронная карта (МЭК) полей состоит из нескольких слоев [2] - математический, границы полей, водные ресурсы, дорожная сеть и т.д. На их основе создаются наглядные 2-х и 3-х мерные цветные карты полей (рис. 3а и 3б, соответственно). Для создания основного слоя «границы» используется высокоточный приемник, получающий одновременно данные измерений навигационных КА и корректирующие поправки от близко расположенной базовой станции, либо через спутник связи. Чаще всего он устанавливается на автомобиле (рис. 4), на котором специалист объезжает поле, фиксируя в памяти соединенного с приемником ноутбука с частотой ~1 секунды координаты границ поля с весьма высокой (до единиц сантиметров) точностью, значительно превышающей требования государственного кадастра к измерениям границ земель сельскохозяйственного назначения. Остальные слои создаются на основе цифровых карт местности соответствующего масштаба, либо также как слой» границы», путём непосредственного определения координат объектов (водоемы, дороги, препятствия на полях и др.). Важно отметить, что все слои и МЭК в целом представляют собой цифровые компьютерные файлы, что кардинально меняет всю технологию работ с картами, ранее имевшимися только в бумажном виде. а) Пример 2-х мерной цветной карты полей б) Пример 3-х мерной цветной карты полей Рисунок 3 – Примеры 2-х и 3-х мерных карт полей Рисунок 4- Автомобиль для полевых обследований По мере сбора информации о поле и посевах, в МЭК можно добавлять новые слои: агрохимическое состояние почвы, урожайность выращиваемой культуры и многое другое. Накопленная за несколько лет в МЭК информация о полях и посевах растениеводческого предприятия фактически является главной составляющей «цифровой истории» работы хозяйства. Мониторинг местонахождения и функционирования сельскохозяйственных машин и других подвижных объектов Решение с помощью спутниковых систем позиционирования и навигации задачи определения текущего местоположения подвижных объектов представляет интерес не только для сельского хозяйства, но и для многих других направлений деятельности: грузоперевозки, мореплавание, авиация, защита транспортных средств от угона и др. Для наземного транспорта как правило достаточно определения траектории передвижения объекта и контроля расхода топлива или его остатка в баке (рис. 5). Специфика сельскохозяйственных машин состоит в том, что они при проведении полевых работ выполняют гораздо более сложные операции по обработке посевов чем простое перемещение людей или грузов. Поэтому помимо указанных выше данных отдельный интерес представляет информация о параметрах, выполняемых данной машиной (комбайн, самоходный опрыскиватель и т.п.), либо ее прицепным агрегатом (плуг, сеялка, борона и т.п.) операции. Для этого на машину или прицепной агрегат устанавливаются датчики, измеряющие, например, расход пестицидов, семян, глубину вспашки (как вариант-через измерение усилия на бугеле прицепного агрегата), урожайность и многое другое [3]. Массивы этой информации, привязанные ко времени и координатам местонахождения объекта в моменты измерений записываются на бортовой компьютерный накопитель, либо передаются по каналам мобильной связи на стационарный компьютер соответствующим специалистам для оценки качества и объема выполняемых полевых работ (рис. 6). Потребная точность определения текущих координат машины зависит от типа выполняемой полевой операции: сплошная обработка паров (поле без посевов) - ~1 метр; полив или опрыскивание всей площади посевов - ~1 метр; сев, обработка, уборка урожая не рядковых культур (зерновые) - ~0,3-0,5 метра; сев, обработка, уборка урожая рядковых культур (свекла, картофель и др.) - ~3-10 см. Рисунок 5 – Оборудование для системы мониторинга (бортовой контроллер и датчик уровня топлива) Рисунок 6 -Рабочее место специалиста, контролирующего выполняемые сельхозтехникой полевые работы В каждом отдельном случае требования по точности позиционирования контролируемого объекта могут отличаться от приведенных выше в зависимости от возможностей машины и механизатора обеспечивать заданную точность траектории движения, погрешностей данных о координатах обрабатываемых участков посевов или отдельных растений и др. Устройства параллельного вождения и автопилоты Возможность определения текущего положения трактора или другой сельскохозяйственной машины при движении по полю привела к созданию весьма полезных для повышения качества обработки почвы и посевов приборов: устройств параллельного вождения (УПВ) и автопилотов [4,5]. УПВ состоит из двух связанных блоков: ГЛОНАСС/GPS приемник, устанавливаемый на крыше или капоте машины и монитор, располагаемый внутри кабины перед механизатором (рис. 7). Рисунок 7 -Оборудование для устройства параллельного вождения Перед началом работы механизатор выставляет на экране монитора положение первой борозды- прямую линию от начала движения от края поля до достижения другого его края. Также водитель задает расстояние между бороздами. При движении по полю вдоль первой и всех последующих линий (борозда -загонка) на мониторе отображается фактическое положение агрегата относительно заданной прямой (рис. 8). Задача механизатора - минимизировать отклонения траектории движения от этой прямой. Использование УПВ резко снижает требования к мастерству механизатора, упрощает его работу в условиях тумана, дождя и ночное время без потери качества выполнения полевых работ. Также отпадает необходимость установки по кроям поля маркеров, ориентируясь по которым водитель разворачивается и выводит машину точно на следующую борозду. При движении по полю механизатор вообще не имеет ориентиров, кроме предыдущей борозды, при условии, что выполняемая им операция оставляет след на почве или посевах. Поэтому наличие на тракторах, опрыскивателях и др. УПВ стала весьма востребованной опцией, сравнительно не дорогой и весьма полезной. Фактический маршрут движения можно записать в память УПВ и передать на компьютер в офис для дальнейшего анализа и оценки результатов выполнения производственного задания. УПВ в основном используются для выполнения полевых работ, не требующих очень высокой точности, например-для обработки паров, или посевов не рядковых культур. Для таких работ важна не абсолютная точность позиционирования, а только относительная, позволяющая после разворота на границе поля эквидистантно вести машину на заданном расстоянии относительно предыдущего прохода. Для этого достаточно точности позиционирования ~0,3-1,5 метра. В зависимости от того, какая точность необходима для выполнения полевых работ, в УПВ используются приемники без и с возможностью приема поправок. Рисунок 8 - Отображение траектории движения агрегата на экране устройства параллельного вождения УПВ по своей сути является частью человеко-машинной системы управления сельскохозяйственным агрегатом, решая задачу сбора координатной информации со спутников, ее обработки и отображения на карте местности текущего положения объекта относительно заданной траектории движения по полю. Выбор и реализация управляющих воздействий-управление движением сельскохозяйственной машины по полю-осуществляет механизатор. Принципиальное отличие автопилота от УПВ состоит в том, что он является полноценной автоматизированной системой управления (АСУ), полностью берущей на себя управление агрегатом в поле. При этом отклонения фактической траектории движения агрегата по пою от заданной по сравнению с УПВ в 5-10 раз меньше, особенно при наличии возможности получения от близко расположенных наземных базовых станций (RTK) дифференциальных поправок (рис. 9). Поэтому автопилоты успешно применяются при обработке рядковых культур (капуста, свекла и т.п.). Рисунок 9 -Переносная базовая станция для формирования дифференциальных поправок Существуют автоматизированные бортовые устройства вождения, представляющие упрощенный вариант автопилота. Их называют «подруливающие устройства», поскольку управление движением осуществляется не прямым подключением автопилота к гидравлическим, либо электрическим блокам ходовой части машины, а вращением рулевого колеса по командам автопилота с помощью специального устройства с обрезиненным роликом, прижатым к рулю (устройство выглядит как динамо-машинка, которую ранее устанавливали на колесе велосипеда для выработки электроэнергии для фары, рис. 10). Есть и другой вариант исполнения подруливающего устройства. В нем привод вращения руля устанавливается непосредственно на рулевую колонку (рис. 11). Рисунок 10 -Подруливающее устройство на руле Рисунок 11 -Подруливающее устройство на рулевой колонке Съёмка Земли из космоса Как известно, съемка поверхности Земли из космоса, называемая также «дистанционное зондирование Земли (ДЗЗ)» обеспечивает получение изображений различного разрешения на местности (от ~0,3 метра до десятков и сотен метров) в видимом, ближнем инфракрасном (ИК), тепловом инфракрасном и сверхвысокочастотном (СВЧ) диапазонах длин электромагнитных волн. Наиболее востребованы снимки, сделанные установленными на КА сканерами, фото и видео аппаратурой видимого и ближнего ИК диапазонов. В настоящее время на околоземной орбите находится несколько десятков КА ДЗЗ, запущенных Россией, Китаем, США, Индией и рядом других стран. В последние годы сельское хозяйство является одним из главных потребителей результатов съемок Земли из космоса. Изображения, обрабатываемые как одиночные, либо сложенные в «мозаики», используются для решения ряда важных задач растениеводства [6]. Создание слоёв электронных карт сельскохозяйственных угодий Выше был описан вариант решения данной задачи с использованием установленных на автомашине спутниковых приемников систем ГЛОНАСС/GPS, архивной и вновь собираемой картографической информации. Космическая съемка также позволяет это сделать. По данным ДЗЗ видимого и ближнего ИК диапазонов различного разрешения создаются в цифровом виде слои электронных карт различного масштаба (рис.12): границы полей, пастбищ и др.; дорожная сеть, водоемы, реки, линии электропередач, препятствия на полях и др.; наличие, либо отсутствие посевов на полях; ход уборки урожая (на какой части площади полей убран урожай). Рисунок 12 – Пример слоев электронной карты полей Потребителями таких карт являются как государственные министерства и ведомства (федеральные и региональные Министерства сельского хозяйства, статистические управления и др.), так и сельскохозяйственные предприятия любой формы собственности. Поэтому востребованы различные масштабы карт и, соответственно, разрешения на местности спутниковых снимков. Анализ состояния посевов с учётом внутри полевой изменчивости В последние годы активно развивается направление по созданию и применению компьютерных технологий для более детального анализа состояния посевов на основе данных ДЗЗ, в частности: выделение проблемных участков на полях (сорняки, болезнями, вредители, недостаток влаги в почве и растениях и т.д.); оценка биомассы и прогноз урожайности. Рассмотрим более подробно эти задачи, для решения которых используется одна и та же методика [7,8]. Она основана на расчете для каждого единичного пиксела изображения (предполагается, что бортовая съемочная аппаратура, обеспечивает получение изображений в четырёх спектральных диапазонах: «синем» «зеленом», «красном» и «ближнем ИК») так называемого индекса NDVI (нормализованный вегетационный индекс). Оценка состояния посевов в прямоугольнике, представляющем проекцию одного, либо нескольких пикселов матрицы прибора на поверхности Земли, выполняется на основании двух известных фактов: здоровое растение активно поглощает «красный» свет и отражает «ближний ИК», больное, угнетенное растение - наоборот. Индекс NDVI рассчитывается как разница между значениями отраженных растениями потоков солнечного света в «ближнем ИК» и «красном» участках спектра, деленная на их сумму. Имеющие практический смысл значения NDVI в зависимости от состояния посевов варьируются в процессе роста и созревания растений от 0,15 (очень плохое состояние) до примерно 0,85 (отличное состояние). Следует отметить, что на ранних и среднесрочных фазах роста растений данный индекс позволяет в большинстве случаев определить только координаты и размеры проблемных участков, а не причины их возникновения (рис. 13). В то же время, на более поздних стадиях (NDVI в диапазоне 0,5-0,85) значение индекса, в совокупности с данными за несколько предыдущих лет о погодных условиях и урожайности данной культуры на этом же поле, дает возможность довольно точно спрогнозировать важный показатель - урожайность возделываемый культуры в текущем году на отдельных участках участках и в целом по полю. Рисунок 13 – Пример изображения поля с распределением индекса NDVI (определенные цвета соответствуют различным значениям индекса) Изображения, полученные в СВЧ диапазоне локаторами бокового обзора с синтезированной апертурой с КА типа Sentinel 1 и 2 также постепенно находят применение в сельском хозяйстве. СВЧ-изображения лишены той наглядности, которая присуща снимкам в видимой части спектра. Причина очевидна - человеческий глаз не «работает» в радио диапазоне электромагнитных волн. Однако, преимущества радаров (возможность проведения съемки независимо от облачности и освещения) привели к тому, что их используют при решении таких задач, как: создание 3-х мерной модели рельефа (DEM); распознавание этапа уборки урожая и, в некоторых случаях, других полевых операций. Бурное развитие беспилотной авиации, как самолетного, так и вертолетного типа, привело к заметному расширению перечня задач, решаемых методами дистанционного мониторинга сельскохозяйственных угодий, в том числе: создание крупномасштабных электронных карт полей; контроль состояния посевов на ранних стадиях вегетации, включая автоматический подсчет количества всходов и определение координат каждого растения; определение видов сорняков и болезней посевов. Последние две задачи решаются с использованием современных методов распознавания объектов на изображениях, основанных на технологиях «искусственного интеллекта» и «машинного обучения». Это одно из весьма перспективных направлений цифровизации сельского хозяйства, достойная отдельного рассмотрения, выходящего за рамки данной статьи. Важно отметить, что сравнительно малая высота полетов дронов (десятки-сотни метров) позволяет проводить с их помощью съемку полей ниже границ облачности с разрешением на местности до единиц сантиметров. Одновременная съемка одних и тех же территорий из космоса, беспилотными аппаратами и, при необходимости, проведение их обследований специалистом непосредственно в поле (так называемая «этажерка») дает особый - синергический - эффект, т.к., заметно его увеличивает по сравнению с применением указанных технологий по отдельности (рис. 14). Рисунок 14 - Синхронный 3-х уровневый (космос, воздух, Земля) мониторинг состояния посевов Цифровизация Нетрудно заметить, что перечисленные выше задачи довольно условно отнесены к тому или иному направлению (связь, навигация, съемка Земли из космоса). На практике, их решения, реализованные в виде аппаратно-программных комплексов, являются составными элементами единой автоматизированной системы управления (АСУ) сельскохозяйственным предприятием. Подобные системы появились в мире на рынке агробизнеса всего несколько лет назад. В России они уже внедрены в хозяйствах, общая площадь обрабатываемых земель которых составляет более 20 миллионов гектар (20-25% от площади используемых сельскохозяйственных земель страны). В частности, АСУ «История поля» [9], используемая в нескольких сотнях агропредприятий России общей площадью примерно 10 миллионов гектар, состоит из следующих основных информационно связанных подсистем (рис. 15): многослойные электронные карты полей; полевые осмотры; мониторинг состояния посевов; планирование производства; мониторинг сельскохозяйственной и иной техники; геоинформационная система; склады, элеваторы, весовые; финансы; база данных. Рисунок 15 -Функциональная схема облачного сервиса «История поля» По сути, такие АСУ выполняют функции, аналогичные возложенным на Центры управления космическими полетами (ЦУП). Большинство современных объектов контроля и управления в растениеводческой хозяйстве (трактора, комбайны, склады, элеваторы, весовые и др.) сравнительно легко могут быть представлены в виде своих «цифровых двойников». Также уже давно компьютеризирован бухгалтерский и кадровый учёт. А вот что касается цифрового описания основного «подопечного» такого Центра управления полями - посевов культурных растений - все оказывается принципиально более сложным. Объясняется это тем, что до сих пор не создана многопараметрическая цифровая модель «растение-почва-атмосфера» даже для конкретных регионов с известным составом почв, погодными условиями, выращиваемыми культурами и технологиями их возделывания. Поэтому в настоящее время контроль и управление посевами строится на разумном сочетании возможностей АСУ со знаниями, опытом и интуицией агрономов, а также других квалифицированных специалистов. При этом одновременно решается важнейшая задача - уточняются на основе фактических данных цифровые модели «посевы-почва-атмосфера». Прогноз Ограничим рамки прогноза сотрудничества космической и сельскохозяйственной отраслей следующими условиями: также, как и в названии статьи, прогноз будет «однонаправленным» и касаться только возможностей использования космических достижений в сельском хозяйстве, а не наоборот: например, выращивания на пилотируемых КА потребляемых в пищу или используемых для поглощения углекислого газа и выделения кислорода растений в космосе и т.п.); рассматриваются перспективы реального развития «аграрно-космических» технологий только на ближайшие (5-10 лет) годы, причем в первую очередь в интересах растениеводства и только частично животноводства, не касаясь таких направлений, как искусственная пища, городское вертикальное растениеводство и др. Представим кратко приоритетные для сельского хозяйства ожидания от космической отрасли: ввод в штатную эксплуатацию нескольких космических группировок малых низкоорбитальных КА, обеспечивающих полное покрытие сельскохозяйственных земель России высокоскоростной мобильной связью и Интернетом; ежедневное обновление многоспектральных космических изображений любой заданной территории (поля, пастбища и т.п.) с разрешением на местности не хуже 5-10 метров, а также локальных метеопрогнозов; достижение точности позиционирования подвижных объектов (сельскохозяйственная техника и др.) по сигналам от спутниковых навигационных систем порядка единиц сантиметров. Достижение этих целей позволит, в частности: широко внедрить в практику выполнения полевых операций роботизированные трактора, комбайны, опрыскиватели и другие агрегаты, способные позиционироваться на местности с точностью единиц сантиметров и автономно, либо в реальном времени по командам из ЦУПа, выполнять полевые операции без присутствия механизаторов; на основании синхронно поступающих с КА дистанционного зондирования Земли и воздушных дронов в режиме онлайн определять с помощью технологий искусственного интеллекта проблемные участки посевов и, идентифицировав причины появления поражения, разработать комплекс мер по их устранению с помощью пилотируемых или беспилотных сельскохозяйственных агрегатов, в том числе, воздушных дронов-опрыскивателей; создать с использование технологий Искусственного интеллекта достаточно точные локальные (для данного хозяйство или района) цифровые модели системы «посевы-почва-атмосфера» и использовать их в работе АСУ (ЦУП) предприятием. Подводя итоги, можно с уверенностью констатировать, что в ближайшие годы сельское хозяйство станет одной из наиболее высокотехнологичных отраслей экономики страны.
КОСМОС - СЕЛЬСКОМУ ХОЗЯЙСТВУОсвоение космического пространства, подготовленное трудами К.Э. Циолковского, Ф.А. Цандера, Г. Оберта и других ученых, началось в октябре 1957 года с запуска в СССР первого искусственного спутника Земли (ИСЗ) и полета Ю.А. Гагарина в апреле 1961 года. За прошедшие с этих исторических дат годы существенно изменились цели полетов в космос: достижения первых лет (выход в открытый космос, стыковка КА, длительное пребывание человека в космосе и др.) уступили место применению космических средств для решения конкретных задач в интересах науки и «земной» деятельности человечества. Современное сельское хозяйство является одной из отраслей, в которой использование наземно-космических средств и предоставляемых ими сервисов не только весьма полезно, но, зачастую, просто необходимо. В качестве подтверждения этого тезиса, далее будут рассмотрены состояние и основные перспективы развития темы «Космос - сельскому хозяйству». Связь Надежная телефонная связь всегда была важна для управления сельскохозяйственным предприятием, хотя она и не решала проблему оперативного обмена информацией со специалистами, работающими в полях. Для этого использовались проводные каналы связи (телефон, факс), а также компактные радиостанции, дальность действия которых не превышала нескольких километров при, как правило, низком качестве связи. Все изменилось с появлением мобильной связи и Интернета. С их развитием стало возможным решение ряда важных и актуальных для аграрного сектора задач: оперативная мобильная связь всех сотрудников предприятия, обеспечивающая общение голосом, передачу изображений, цифровых массивов и т.п.; наличие голосовой связи способствует организации постоянного контроля, либо, при необходимости, корректировки выполняемых работниками предприятия производственных заданий; возможность передачи цифровых массивов (изображений, видео и т.п.) позволяет кардинально изменить работу агрономов и агрономической службы хозяйства в целом. Сегодня агроном, обследующий состояние посевов, может сделать своим мобильным телефоном фото проблемных (засоренность сорняками, поражения болезнями, грызунами, насекомыми и др.) участков и немедленно отправить их по GSM в стационарный офис для анализа и принятия решения по технологии обработки таких зон; контроль в реальном времени местонахождения и функционирования сельскохозяйственных машин, а также любых других подвижных объектов; дистанционный сбор данных с собственных метеостанций и иных стационарных полевых измерительных устройств. В качестве примера, рассмотрим более подробно работу современного агронома в полевых условиях. И ранее, и сегодня задача агронома одна и та же: определить текущее состояние посевов, либо их отдельных участков, сравнить с планировавшимся на данный момент, определить отклонения (сорняки, повреждения грызунами, болезнями, угнетение из-за недостатка влаги и т.д.); определить наиболее эффективные меры воздействия (обработка гербицидами, внесение удобрений, полив и т.п.), восстанавливающие нормальное развитие культурных растений; реализовать эти меры путём проведения соответствующих полевых операций (опрыскивание, внесение в почву, полив и т.д.). Периодическое повторение перечисленных действий обеспечит развитие культурных растений по сценарию, наиболее близкому к расчетному. Нетрудно видеть, что, если отвлечься от предметной области - растениеводства, фактически описана классическая схема работы системы управления с обратной связью: измерение контролируемых параметров работы некой системы; определение их отклонений от расчетных; выбор и реализация управляющих воздействий, устраняющих отклонения; повторение цикла «измерение - расчет отклонения - устранение отклонения». Данная аналогия несет в себе вполне практический смысл. Она позволяет структурировать и формализовать работу агрономической службы сельскохозяйственного предприятия и постепенно максимально автоматизировать ее работу. Конкретно это выглядит следующим образом. Агроном, обнаружив при проведении полевых осмотров проблемный участок в посевах, делает своим мобильным телефоном несколько его фотографий. Затем он в ручном , либо автоматическом режиме идентифицирует причину повреждения посевов, например, определив по загруженному в его телефон справочнику сорных растений, какой конкретно это сорняк (название) и какие меры его устранения (вид гербицида, доза и сроки внесения на единицу площади и др.) Рекомендуемый вариант агроном пересылает в агрономическую службу непосредственно с поля, либо после возвращения на свое рабочее место представляет руководству агрономической службы полную информацию: координаты и размеры проблемных участков, причина повреждения, рекомендуемые меры по их устранению. Важно отметить, что самый трудоемкий этап-мониторинг состояния посевов и выявление проблемных участков-на сегодняшний день успешно выполняется с помощью беспилотных летательных аппаратов (БЛА) самолетного, либо вертолетного типа. Эти аппараты могут за день обследовать большие площади посевов, не повреждая их передвижением по ним. Описанная технология позволяет существенно повысить качество работы и производительность агрономических служб. При этом квалификация конкретного агронома перестает играть решающее значение, поскольку его функции ограничиваются съемкой на телефон, работой с электронным справочником и пересылкой всей информации в стационарный офис. С учётом довольно острой нехватки высококвалифицированных агрономов это обстоятельство имеет важное значение для многих, особенно малых и средних, растениеводческих предприятий России. В настоящее время и связь, и Интернет практически полностью базируются на наземных средствах коммуникации, проводных и беспроводных. Поэтому во многих хозяйствах, особенно расположенных в отдаленных районах, Интернет, а нередко и мобильная связь, отсутствует в полях. Это резко обесценивает применение в аграрном секторе уже имеющихся цифровых технологий и их дальнейшее развитие. Существующие спутниковые системы связи (Гонец, Иридиум, Globalnet и др.) позволяют находящимся на Земле пользователям общаться голосом, либо передавать текстовые сообщения практически из любой точки Земли. К сожалению, скорость обмена данными по ним измеряются всего несколькими десятками Кбит/с, что достаточно только для экстренных сообщений, коротких текстов и IoT. В последние годы бурно развиваются космические средства связи, обеспечивающие покрытие высокоскоростным Интернетом всей поверхности Земли. Это-уже находящаяся в эксплуатации первая очередь группировки КА связи Starlink [1], насчитывающая по состоянию на апрель 2023 года ~4300 КА со скоростью обмена данными «КА связи-наземный терминал» примерно 80-100 Мбит/с (рис. 1). Недавно в России началась реализация масштабного проекта «Сфера» (рис. 2) по завершению которого на околоземной орбите будет находиться несколько сотен КА, часть из которых будут связными, а остальные - проводить съемку поверхности Земли. Основанные на группировках малых КА, насчитывающих сотни-тысячи аппаратов, и малогабаритных мобильных наземных терминалах, эти технологии в ближайшие годы произведут очередную «техническую революции» в связи, в том числе, и в ее роли в цифровизации сельского хозяйства. Рисунок 1 - Схема спутниковой сети Starlink (ЦУС/NMS - Центр Управления Сетью/Network Management System; PoP – Point of Presence - узлы Google; ВОЛС – волоконно-оптическая линия связи, арендованная у наземного оператора, для передачи команд управления) Рисунок 2 – Предполагаемые области применения спутниковой сети «Сфера» Навигация Все отрасли, связанные с работой и перемещением на местности, либо в пространстве, нуждаются в координатной привязке стационарных и подвижных объектов. Это относится к судоходству, авиации, автомобильному транспорту и многим другим отраслям. Очевидно, что агропромышленный комплекс, в первую очередь растениеводство, также входит в их число. Всего лишь несколько десятков лет назад о полноценном решении этой задачи в интересах сельского хозяйства не могло быть и речи. Все ограничивалось проведением наземной геодезической съемки, обеспечивающей определение границ полей при межевании и для земельного кадастра. Причем измерения сохранялись в местной, используемой только для данной территории, системе координат, переход от которой к мировым системам координат был невозможен без наличия доступу к сведениям об их взаимоположении. Первые спутниковые системы позиционирования и навигации появились на рубеже 70-х и 80-х годов прошлого века. Состояли они из двух сегментов- космического и наземного. Космический сегмент — это группировка КА, расположенных на орбитах таким образом, чтобы в любой момент времени в заданном районе либо в произвольной точке поверхности Земли были видны минимум 4 КА. Для обеспечения координатной привязки и навигации в отдельном районе Земли достаточно 7-10 КА, а для всей поверхности Земли - около 20 и более. Локальные системы, обслуживающие только заданную территорию, как правило, одну страну, создают Индия, Япония и ряд других стран. Глобальными системами, обслуживающими десятки стран мира, являются: ГЛОНАСС (Россия, 24 КА и 2 резервных); GPS (США, 24 КА и 8 резервных); Beidow (Китай, 35 КА и 13 резервных); Galileo (Европа, 23 КА). В России наиболее широко используются две системы, ГЛОНАСС и GPS. У каждой из них есть свои преимущества и недостатки. Основных отличий два: точность определения положения объектов на поверхности Земли в системе ГЛОНАСС составляет 4-6 метров, а в GPS 2-4 метра; ГЛОНАСС обеспечивает более устойчивую работу и высокую точность в полярных районах Земли, что достигается расположением плоскостей орбит КА на больших чем в системе GPS углах наклона этих плоскостей к плоскости экватора. Как показывает опыт их практического применения, наиболее эффективно одновременное использования обеих систем. Поэтому большинство современных навигационных приемников являются двухсистемными. Точность определения координат объекта на поверхности Земли зависит от ряда условий, основными из которых являются следующие: - количество навигационных КА ( не менее 4-х), одновременно находящихся на связи с установленным на объекте приемником их сигналов; помимо количества таких КА, большое влияние на точность оказывает также их взаиморасположение, что можно пояснить на простом примере-для определения расстояния до какого-либо объекта, размеры которого неизвестны, человек должен видеть его одновременно двумя глазами, поэтому если расстояние между двумя или более КА малы, погрешность будет выше; информация от навигационных спутников поступает непосредственно в наземный приемник и используется в режиме реального времени; в этом случае точности определения координат составляют, как указано выше, несколько метров; в определении текущих координат подвижного объекта участвует стационарная базовая станция, находящаяся на связи с объектом и в реальном времени передающая на его навигационный приемник корректирующие поправки , повышающие точность вплоть до единиц сантиметров, при условии, что расстояние между базовой станцией и объектом невелико ( до нескольких десятков километров);такие же поправки могут передавать через спутник связи от базовой станции , расположенной на любом расстоянии от объекта, но точность падает при его увеличении и составляет десятки сантиметров; скорость передвижения объекта (не имеет большого значения для сельского хозяйства, поскольку скорости перемещения сельскохозяйственных и прочих машин не оказывают заметного влияния на точность). Появление спутниковых систем произвело в буквальном смысле переворот в сельском хозяйстве. Стало возможным решение многих важных производственных задач, среди которых наиболее приоритетными являются следующие. Создание многослойных электронных карт полей и других сельскохозяйственных угодий Многослойная электронная карта (МЭК) полей состоит из нескольких слоев [2] - математический, границы полей, водные ресурсы, дорожная сеть и т.д. На их основе создаются наглядные 2-х и 3-х мерные цветные карты полей (рис. 3а и 3б, соответственно). Для создания основного слоя «границы» используется высокоточный приемник, получающий одновременно данные измерений навигационных КА и корректирующие поправки от близко расположенной базовой станции, либо через спутник связи. Чаще всего он устанавливается на автомобиле (рис. 4), на котором специалист объезжает поле, фиксируя в памяти соединенного с приемником ноутбука с частотой ~1 секунды координаты границ поля с весьма высокой (до единиц сантиметров) точностью, значительно превышающей требования государственного кадастра к измерениям границ земель сельскохозяйственного назначения. Остальные слои создаются на основе цифровых карт местности соответствующего масштаба, либо также как слой» границы», путём непосредственного определения координат объектов (водоемы, дороги, препятствия на полях и др.). Важно отметить, что все слои и МЭК в целом представляют собой цифровые компьютерные файлы, что кардинально меняет всю технологию работ с картами, ранее имевшимися только в бумажном виде. а) Пример 2-х мерной цветной карты полей б) Пример 3-х мерной цветной карты полей Рисунок 3 – Примеры 2-х и 3-х мерных карт полей Рисунок 4- Автомобиль для полевых обследований По мере сбора информации о поле и посевах, в МЭК можно добавлять новые слои: агрохимическое состояние почвы, урожайность выращиваемой культуры и многое другое. Накопленная за несколько лет в МЭК информация о полях и посевах растениеводческого предприятия фактически является главной составляющей «цифровой истории» работы хозяйства. Мониторинг местонахождения и функционирования сельскохозяйственных машин и других подвижных объектов Решение с помощью спутниковых систем позиционирования и навигации задачи определения текущего местоположения подвижных объектов представляет интерес не только для сельского хозяйства, но и для многих других направлений деятельности: грузоперевозки, мореплавание, авиация, защита транспортных средств от угона и др. Для наземного транспорта как правило достаточно определения траектории передвижения объекта и контроля расхода топлива или его остатка в баке (рис. 5). Специфика сельскохозяйственных машин состоит в том, что они при проведении полевых работ выполняют гораздо более сложные операции по обработке посевов чем простое перемещение людей или грузов. Поэтому помимо указанных выше данных отдельный интерес представляет информация о параметрах, выполняемых данной машиной (комбайн, самоходный опрыскиватель и т.п.), либо ее прицепным агрегатом (плуг, сеялка, борона и т.п.) операции. Для этого на машину или прицепной агрегат устанавливаются датчики, измеряющие, например, расход пестицидов, семян, глубину вспашки (как вариант-через измерение усилия на бугеле прицепного агрегата), урожайность и многое другое [3]. Массивы этой информации, привязанные ко времени и координатам местонахождения объекта в моменты измерений записываются на бортовой компьютерный накопитель, либо передаются по каналам мобильной связи на стационарный компьютер соответствующим специалистам для оценки качества и объема выполняемых полевых работ (рис. 6). Потребная точность определения текущих координат машины зависит от типа выполняемой полевой операции: сплошная обработка паров (поле без посевов) - ~1 метр; полив или опрыскивание всей площади посевов - ~1 метр; сев, обработка, уборка урожая не рядковых культур (зерновые) - ~0,3-0,5 метра; сев, обработка, уборка урожая рядковых культур (свекла, картофель и др.) - ~3-10 см. Рисунок 5 – Оборудование для системы мониторинга (бортовой контроллер и датчик уровня топлива) Рисунок 6 -Рабочее место специалиста, контролирующего выполняемые сельхозтехникой полевые работы В каждом отдельном случае требования по точности позиционирования контролируемого объекта могут отличаться от приведенных выше в зависимости от возможностей машины и механизатора обеспечивать заданную точность траектории движения, погрешностей данных о координатах обрабатываемых участков посевов или отдельных растений и др. Устройства параллельного вождения и автопилоты Возможность определения текущего положения трактора или другой сельскохозяйственной машины при движении по полю привела к созданию весьма полезных для повышения качества обработки почвы и посевов приборов: устройств параллельного вождения (УПВ) и автопилотов [4,5]. УПВ состоит из двух связанных блоков: ГЛОНАСС/GPS приемник, устанавливаемый на крыше или капоте машины и монитор, располагаемый внутри кабины перед механизатором (рис. 7). Рисунок 7 -Оборудование для устройства параллельного вождения Перед началом работы механизатор выставляет на экране монитора положение первой борозды- прямую линию от начала движения от края поля до достижения другого его края. Также водитель задает расстояние между бороздами. При движении по полю вдоль первой и всех последующих линий (борозда -загонка) на мониторе отображается фактическое положение агрегата относительно заданной прямой (рис. 8). Задача механизатора - минимизировать отклонения траектории движения от этой прямой. Использование УПВ резко снижает требования к мастерству механизатора, упрощает его работу в условиях тумана, дождя и ночное время без потери качества выполнения полевых работ. Также отпадает необходимость установки по кроям поля маркеров, ориентируясь по которым водитель разворачивается и выводит машину точно на следующую борозду. При движении по полю механизатор вообще не имеет ориентиров, кроме предыдущей борозды, при условии, что выполняемая им операция оставляет след на почве или посевах. Поэтому наличие на тракторах, опрыскивателях и др. УПВ стала весьма востребованной опцией, сравнительно не дорогой и весьма полезной. Фактический маршрут движения можно записать в память УПВ и передать на компьютер в офис для дальнейшего анализа и оценки результатов выполнения производственного задания. УПВ в основном используются для выполнения полевых работ, не требующих очень высокой точности, например-для обработки паров, или посевов не рядковых культур. Для таких работ важна не абсолютная точность позиционирования, а только относительная, позволяющая после разворота на границе поля эквидистантно вести машину на заданном расстоянии относительно предыдущего прохода. Для этого достаточно точности позиционирования ~0,3-1,5 метра. В зависимости от того, какая точность необходима для выполнения полевых работ, в УПВ используются приемники без и с возможностью приема поправок. Рисунок 8 - Отображение траектории движения агрегата на экране устройства параллельного вождения УПВ по своей сути является частью человеко-машинной системы управления сельскохозяйственным агрегатом, решая задачу сбора координатной информации со спутников, ее обработки и отображения на карте местности текущего положения объекта относительно заданной траектории движения по полю. Выбор и реализация управляющих воздействий-управление движением сельскохозяйственной машины по полю-осуществляет механизатор. Принципиальное отличие автопилота от УПВ состоит в том, что он является полноценной автоматизированной системой управления (АСУ), полностью берущей на себя управление агрегатом в поле. При этом отклонения фактической траектории движения агрегата по пою от заданной по сравнению с УПВ в 5-10 раз меньше, особенно при наличии возможности получения от близко расположенных наземных базовых станций (RTK) дифференциальных поправок (рис. 9). Поэтому автопилоты успешно применяются при обработке рядковых культур (капуста, свекла и т.п.). Рисунок 9 -Переносная базовая станция для формирования дифференциальных поправок Существуют автоматизированные бортовые устройства вождения, представляющие упрощенный вариант автопилота. Их называют «подруливающие устройства», поскольку управление движением осуществляется не прямым подключением автопилота к гидравлическим, либо электрическим блокам ходовой части машины, а вращением рулевого колеса по командам автопилота с помощью специального устройства с обрезиненным роликом, прижатым к рулю (устройство выглядит как динамо-машинка, которую ранее устанавливали на колесе велосипеда для выработки электроэнергии для фары, рис. 10). Есть и другой вариант исполнения подруливающего устройства. В нем привод вращения руля устанавливается непосредственно на рулевую колонку (рис. 11). Рисунок 10 -Подруливающее устройство на руле Рисунок 11 -Подруливающее устройство на рулевой колонке Съёмка Земли из космоса Как известно, съемка поверхности Земли из космоса, называемая также «дистанционное зондирование Земли (ДЗЗ)» обеспечивает получение изображений различного разрешения на местности (от ~0,3 метра до десятков и сотен метров) в видимом, ближнем инфракрасном (ИК), тепловом инфракрасном и сверхвысокочастотном (СВЧ) диапазонах длин электромагнитных волн. Наиболее востребованы снимки, сделанные установленными на КА сканерами, фото и видео аппаратурой видимого и ближнего ИК диапазонов. В настоящее время на околоземной орбите находится несколько десятков КА ДЗЗ, запущенных Россией, Китаем, США, Индией и рядом других стран. В последние годы сельское хозяйство является одним из главных потребителей результатов съемок Земли из космоса. Изображения, обрабатываемые как одиночные, либо сложенные в «мозаики», используются для решения ряда важных задач растениеводства [6]. Создание слоёв электронных карт сельскохозяйственных угодий Выше был описан вариант решения данной задачи с использованием установленных на автомашине спутниковых приемников систем ГЛОНАСС/GPS, архивной и вновь собираемой картографической информации. Космическая съемка также позволяет это сделать. По данным ДЗЗ видимого и ближнего ИК диапазонов различного разрешения создаются в цифровом виде слои электронных карт различного масштаба (рис.12): границы полей, пастбищ и др.; дорожная сеть, водоемы, реки, линии электропередач, препятствия на полях и др.; наличие, либо отсутствие посевов на полях; ход уборки урожая (на какой части площади полей убран урожай). Рисунок 12 – Пример слоев электронной карты полей Потребителями таких карт являются как государственные министерства и ведомства (федеральные и региональные Министерства сельского хозяйства, статистические управления и др.), так и сельскохозяйственные предприятия любой формы собственности. Поэтому востребованы различные масштабы карт и, соответственно, разрешения на местности спутниковых снимков. Анализ состояния посевов с учётом внутри полевой изменчивости В последние годы активно развивается направление по созданию и применению компьютерных технологий для более детального анализа состояния посевов на основе данных ДЗЗ, в частности: выделение проблемных участков на полях (сорняки, болезнями, вредители, недостаток влаги в почве и растениях и т.д.); оценка биомассы и прогноз урожайности. Рассмотрим более подробно эти задачи, для решения которых используется одна и та же методика [7,8]. Она основана на расчете для каждого единичного пиксела изображения (предполагается, что бортовая съемочная аппаратура, обеспечивает получение изображений в четырёх спектральных диапазонах: «синем» «зеленом», «красном» и «ближнем ИК») так называемого индекса NDVI (нормализованный вегетационный индекс). Оценка состояния посевов в прямоугольнике, представляющем проекцию одного, либо нескольких пикселов матрицы прибора на поверхности Земли, выполняется на основании двух известных фактов: здоровое растение активно поглощает «красный» свет и отражает «ближний ИК», больное, угнетенное растение - наоборот. Индекс NDVI рассчитывается как разница между значениями отраженных растениями потоков солнечного света в «ближнем ИК» и «красном» участках спектра, деленная на их сумму. Имеющие практический смысл значения NDVI в зависимости от состояния посевов варьируются в процессе роста и созревания растений от 0,15 (очень плохое состояние) до примерно 0,85 (отличное состояние). Следует отметить, что на ранних и среднесрочных фазах роста растений данный индекс позволяет в большинстве случаев определить только координаты и размеры проблемных участков, а не причины их возникновения (рис. 13). В то же время, на более поздних стадиях (NDVI в диапазоне 0,5-0,85) значение индекса, в совокупности с данными за несколько предыдущих лет о погодных условиях и урожайности данной культуры на этом же поле, дает возможность довольно точно спрогнозировать важный показатель - урожайность возделываемый культуры в текущем году на отдельных участках участках и в целом по полю. Рисунок 13 – Пример изображения поля с распределением индекса NDVI (определенные цвета соответствуют различным значениям индекса) Изображения, полученные в СВЧ диапазоне локаторами бокового обзора с синтезированной апертурой с КА типа Sentinel 1 и 2 также постепенно находят применение в сельском хозяйстве. СВЧ-изображения лишены той наглядности, которая присуща снимкам в видимой части спектра. Причина очевидна - человеческий глаз не «работает» в радио диапазоне электромагнитных волн. Однако, преимущества радаров (возможность проведения съемки независимо от облачности и освещения) привели к тому, что их используют при решении таких задач, как: создание 3-х мерной модели рельефа (DEM); распознавание этапа уборки урожая и, в некоторых случаях, других полевых операций. Бурное развитие беспилотной авиации, как самолетного, так и вертолетного типа, привело к заметному расширению перечня задач, решаемых методами дистанционного мониторинга сельскохозяйственных угодий, в том числе: создание крупномасштабных электронных карт полей; контроль состояния посевов на ранних стадиях вегетации, включая автоматический подсчет количества всходов и определение координат каждого растения; определение видов сорняков и болезней посевов. Последние две задачи решаются с использованием современных методов распознавания объектов на изображениях, основанных на технологиях «искусственного интеллекта» и «машинного обучения». Это одно из весьма перспективных направлений цифровизации сельского хозяйства, достойная отдельного рассмотрения, выходящего за рамки данной статьи. Важно отметить, что сравнительно малая высота полетов дронов (десятки-сотни метров) позволяет проводить с их помощью съемку полей ниже границ облачности с разрешением на местности до единиц сантиметров. Одновременная съемка одних и тех же территорий из космоса, беспилотными аппаратами и, при необходимости, проведение их обследований специалистом непосредственно в поле (так называемая «этажерка») дает особый - синергический - эффект, т.к., заметно его увеличивает по сравнению с применением указанных технологий по отдельности (рис. 14). Рисунок 14 - Синхронный 3-х уровневый (космос, воздух, Земля) мониторинг состояния посевов Цифровизация Нетрудно заметить, что перечисленные выше задачи довольно условно отнесены к тому или иному направлению (связь, навигация, съемка Земли из космоса). На практике, их решения, реализованные в виде аппаратно-программных комплексов, являются составными элементами единой автоматизированной системы управления (АСУ) сельскохозяйственным предприятием. Подобные системы появились в мире на рынке агробизнеса всего несколько лет назад. В России они уже внедрены в хозяйствах, общая площадь обрабатываемых земель которых составляет более 20 миллионов гектар (20-25% от площади используемых сельскохозяйственных земель страны). В частности, АСУ «История поля» [9], используемая в нескольких сотнях агропредприятий России общей площадью примерно 10 миллионов гектар, состоит из следующих основных информационно связанных подсистем (рис. 15): многослойные электронные карты полей; полевые осмотры; мониторинг состояния посевов; планирование производства; мониторинг сельскохозяйственной и иной техники; геоинформационная система; склады, элеваторы, весовые; финансы; база данных. Рисунок 15 -Функциональная схема облачного сервиса «История поля» По сути, такие АСУ выполняют функции, аналогичные возложенным на Центры управления космическими полетами (ЦУП). Большинство современных объектов контроля и управления в растениеводческой хозяйстве (трактора, комбайны, склады, элеваторы, весовые и др.) сравнительно легко могут быть представлены в виде своих «цифровых двойников». Также уже давно компьютеризирован бухгалтерский и кадровый учёт. А вот что касается цифрового описания основного «подопечного» такого Центра управления полями - посевов культурных растений - все оказывается принципиально более сложным. Объясняется это тем, что до сих пор не создана многопараметрическая цифровая модель «растение-почва-атмосфера» даже для конкретных регионов с известным составом почв, погодными условиями, выращиваемыми культурами и технологиями их возделывания. Поэтому в настоящее время контроль и управление посевами строится на разумном сочетании возможностей АСУ со знаниями, опытом и интуицией агрономов, а также других квалифицированных специалистов. При этом одновременно решается важнейшая задача - уточняются на основе фактических данных цифровые модели «посевы-почва-атмосфера». Прогноз Ограничим рамки прогноза сотрудничества космической и сельскохозяйственной отраслей следующими условиями: также, как и в названии статьи, прогноз будет «однонаправленным» и касаться только возможностей использования космических достижений в сельском хозяйстве, а не наоборот: например, выращивания на пилотируемых КА потребляемых в пищу или используемых для поглощения углекислого газа и выделения кислорода растений в космосе и т.п.); рассматриваются перспективы реального развития «аграрно-космических» технологий только на ближайшие (5-10 лет) годы, причем в первую очередь в интересах растениеводства и только частично животноводства, не касаясь таких направлений, как искусственная пища, городское вертикальное растениеводство и др. Представим кратко приоритетные для сельского хозяйства ожидания от космической отрасли: ввод в штатную эксплуатацию нескольких космических группировок малых низкоорбитальных КА, обеспечивающих полное покрытие сельскохозяйственных земель России высокоскоростной мобильной связью и Интернетом; ежедневное обновление многоспектральных космических изображений любой заданной территории (поля, пастбища и т.п.) с разрешением на местности не хуже 5-10 метров, а также локальных метеопрогнозов; достижение точности позиционирования подвижных объектов (сельскохозяйственная техника и др.) по сигналам от спутниковых навигационных систем порядка единиц сантиметров. Достижение этих целей позволит, в частности: широко внедрить в практику выполнения полевых операций роботизированные трактора, комбайны, опрыскиватели и другие агрегаты, способные позиционироваться на местности с точностью единиц сантиметров и автономно, либо в реальном времени по командам из ЦУПа, выполнять полевые операции без присутствия механизаторов; на основании синхронно поступающих с КА дистанционного зондирования Земли и воздушных дронов в режиме онлайн определять с помощью технологий искусственного интеллекта проблемные участки посевов и, идентифицировав причины появления поражения, разработать комплекс мер по их устранению с помощью пилотируемых или беспилотных сельскохозяйственных агрегатов, в том числе, воздушных дронов-опрыскивателей; создать с использование технологий Искусственного интеллекта достаточно точные локальные (для данного хозяйство или района) цифровые модели системы «посевы-почва-атмосфера» и использовать их в работе АСУ (ЦУП) предприятием. Подводя итоги, можно с уверенностью констатировать, что в ближайшие годы сельское хозяйство станет одной из наиболее высокотехнологичных отраслей экономики страны. -
 Цифровые решения для нового полевого сезонаНовый полевой сезон продолжит политику активного импортозамещения, цифровизации данных по хозяйствам в Министерстве сельского хозяйства и решения задач по повышению количества урожая и его качества. С этими вопросами помогут отечественные цифровые решения, использующиеся уже сейчас и наращивающие свою долю в общем перечне применяемых технологий. Сложности текущего сезона и предлагаемые решения Прежде всего, сложность вызывают системы Министерства сельского хозяйства, в которые необходимо передавать данные на обязательной основе – ФГИС «Зерно» и «Сатурн», ЕФИС ЗСН. Сюда стекаются данные по уборке урожая, применению пестицидов и агрохимикатов, по полям и культурам. Даже ярые противники цифровых технологий будут вынуждены столкнуться с цифровизацией, потому что это требуется для сдачи отчетности Также ярко выделяется тренд на повышение эффективности производственных процессов. Сейчас на фоне экономических кризисов и обострения политической обстановки нельзя закрывать глаза на не оптимальные производственные процессы, чтобы не терять деньги на ровном месте. Опять же, из года в год переносится проблема отсутствия достаточного количества квалифицированного персонала. Как считают аналитики компании «Геомир», у перечисленных проблем есть следующие решения: ● внедрение автоматизированного учета работ на полях; ● цифровизация учета товарно-материальных ценностей и урожая; ● автоматизированный контроль за качеством выполнения работ; ● использование компьютерных рекомендаций и внешних экспертов. Вывод: доля применения искусственного интеллекта и IT-технологий в сельском хозяйстве должна повышаться. И не только для того, чтобы исполнять требования новых нормативно-правовых актов, но и для повышения эффективности производства. Как внедрить автоматизированный электронный учет в хозяйстве Базовый функционал, который понадобится – терминалы мониторинга движения техники и свободное время специалиста для обработки данных (1 час в день или 5 часов в неделю). Дополнительный – RFID-идентификация орудий и механизаторов и датчики уровня топлива. Этапы автоматизации на основе ПО «История поля»: Подключение мониторинга техники. Подключения RFID-меток орудий и механизаторов. Настройка привязки видов работ к орудиям и культурам. Автоматическое заполнение данных программой (орудия, механизаторы, виды работ, техника, поля, обработанная площадь, дата и время работ, расход ГСМ, смены). Автоматическое формирование документации (учетные и путевые листы, сводка полевых работ, отчет по заработной плате, табель учета выполненных работ, отчет по расходу ГСМ и т. д.). Последний тренд – автоматический учет работ на полях без участия учетчика. Это сокращает влияние человеческого фактора и затраты времени на выполнение каждой отдельной операции. В перспективе учетчики будут просто контролировать автоматический учет полевых работ и участвовать в других процессах в хозяйстве. Компьютерное моделирование в хозяйстве Компьютерное моделирование в текущем состоянии рассчитано на крупные холдинги, но в ближайшем будущем станет доступным широкому кругу сельскохозяйственных производителей. Первое направление – «Оптимизация структуры посевных площадей». Его цель – обеспечение максимальной доходности при соблюдении существующих ограничений: ● агрономических (предшественники, сроки возврата, непригодные площади и другие); ● рыночные (прогнозные цены, ограничения сбыта). Второе направление – «Оптимизация парка техники». Решаемая задача – моделирование оптимального «Плана полевых работ на сезон» и анализ прогнозного дефицита техники, обеспечивающего минимизацию расходов на выполнение работ при соблюдении комплекса ограничений: ● целевая структура посевов по полям; ● агротехнологии (состав и последовательность операций); ● доступность и производительность техники. На фоне ухода зарубежных производителей это особенно актуально: моделирование поможет выбрать какую технику и орудия купить, какие сцепки использовать, как загрузить имеющиеся машины максимально эффективно. Агроскаутинг с помощью дронов Как показывает практика, классический осмотр полей агрономом не дает точных сведений о засоренности полей. Так, если сорняк отчетливо не виден за культурой, он часто пропускается при визуальном осмотре человеком. К тому же, очаги сорняков не распределены равномерно: чаще всего они встречаются с краев или внутри поля в локальных точках и т. д. То есть, классический скаутинг требует модернизации. Эффективное решение для нового полевого сезона – агроскаутинг с помощью дронов. Чем же дрон лучше человека? Наглядно показывает статистика, собранная на практике: ● дрон облетает 100 га за 15 мин, а человек обходит за 1-1,5 часа; ● компьютер анализирует снимки в 6 раз быстрее человека; ● данные с дрона в 5 раз точнее, поскольку собираются с 10-20 точек, а человеком – только с двух. Контролем продолжает заниматься скаут – с планшета или пульта управления. Основные требования к персоналу минимальны – умение запустить дрон и быстрое перемещение между полями для сокращения сроков мониторинга. Вся информация передается в облачный сервис, с которым работает руководитель отдела: он может в любое время зайти в систему и посмотреть, какая ситуация на каком поле зафиксирована на основании распознавания снимков с дронов на текущий момент. Новинки электронных систем В 2023 году будут актуальны следующие новинки электронных систем: ● система оптимизации работы транспорта в поле – алгоритм, оценивающий характеристики поля и машин и выстраивающий оптимальный маршрут движения; ● система автоуправления – комплекс оборудования и ПО, снижающий трудоемкость сельскохозяйственных операций, количество пропусков и перекрытий, влияющий на экономию ГСМ и трудозатрат и обеспечивающий безостановочный цикл работы даже в условиях плохой видимости; ● ночное видение – система, позволяющая в ночное время увеличить обзор до 1500 м, повысив тем самым скорость транспорта на 50%, а производительность – на 30%; ● умные метки – специальные чипы, позволяющие легко идентифицировать любое оборудование (навесное или прицепное), используемое в сельском хозяйстве; ● Face ID – идентификация оператора транспортного средства по лицу, гарантирующая, что техникой управляет человек, имеющий на это право (на замену RFID-меток, которые таких гарантий не дают); ● картирование урожайности – аппаратно-программный комплекс на уборочной технике, позволяющий определить и зафиксировать количество собранного зерна за определенные промежутки времени; Все представленные выше новинки есть в каталоге отечественного поставщика решений для сельского хозяйства «Ростсельмаш». И в новом полевом сезоне их значение вырастет. Повышение урожайности за счет использования точных метеоданных Когда сельское хозяйство сталкивается с засушливым или морозным сезонами, важность метеоданных выходит на первый план. Современные станции позволяют определить, когда лучше всего проводить опрыскивание, с какой скоростью нужно двигаться технике при текущем ветре, как избежать риска «сжигания» урожая и т. д. Этими вопросами активно занимаются компании METOS и Pessl Instruments. Профессиональные метеостанции интегрируются с решениями отечественных поставщиков ПО, в том числе – «Истории поля» от «Геомира». Поступающие от них данные используются для оптимизации используемых ресурсов и повышения урожайности, его качества. Выводы Автоматизация и цифровизация способны решить сложившиеся в сельском хозяйстве проблемы безболезненно и быстро, включая передачу данных государственным надзорным органам, недостаточную квалификацию кадров и эффективность распределения ресурсов. В новом полевом сезоне выиграю компании, взявшие курс на активное внедрение новых технологий.
Цифровые решения для нового полевого сезонаНовый полевой сезон продолжит политику активного импортозамещения, цифровизации данных по хозяйствам в Министерстве сельского хозяйства и решения задач по повышению количества урожая и его качества. С этими вопросами помогут отечественные цифровые решения, использующиеся уже сейчас и наращивающие свою долю в общем перечне применяемых технологий. Сложности текущего сезона и предлагаемые решения Прежде всего, сложность вызывают системы Министерства сельского хозяйства, в которые необходимо передавать данные на обязательной основе – ФГИС «Зерно» и «Сатурн», ЕФИС ЗСН. Сюда стекаются данные по уборке урожая, применению пестицидов и агрохимикатов, по полям и культурам. Даже ярые противники цифровых технологий будут вынуждены столкнуться с цифровизацией, потому что это требуется для сдачи отчетности Также ярко выделяется тренд на повышение эффективности производственных процессов. Сейчас на фоне экономических кризисов и обострения политической обстановки нельзя закрывать глаза на не оптимальные производственные процессы, чтобы не терять деньги на ровном месте. Опять же, из года в год переносится проблема отсутствия достаточного количества квалифицированного персонала. Как считают аналитики компании «Геомир», у перечисленных проблем есть следующие решения: ● внедрение автоматизированного учета работ на полях; ● цифровизация учета товарно-материальных ценностей и урожая; ● автоматизированный контроль за качеством выполнения работ; ● использование компьютерных рекомендаций и внешних экспертов. Вывод: доля применения искусственного интеллекта и IT-технологий в сельском хозяйстве должна повышаться. И не только для того, чтобы исполнять требования новых нормативно-правовых актов, но и для повышения эффективности производства. Как внедрить автоматизированный электронный учет в хозяйстве Базовый функционал, который понадобится – терминалы мониторинга движения техники и свободное время специалиста для обработки данных (1 час в день или 5 часов в неделю). Дополнительный – RFID-идентификация орудий и механизаторов и датчики уровня топлива. Этапы автоматизации на основе ПО «История поля»: Подключение мониторинга техники. Подключения RFID-меток орудий и механизаторов. Настройка привязки видов работ к орудиям и культурам. Автоматическое заполнение данных программой (орудия, механизаторы, виды работ, техника, поля, обработанная площадь, дата и время работ, расход ГСМ, смены). Автоматическое формирование документации (учетные и путевые листы, сводка полевых работ, отчет по заработной плате, табель учета выполненных работ, отчет по расходу ГСМ и т. д.). Последний тренд – автоматический учет работ на полях без участия учетчика. Это сокращает влияние человеческого фактора и затраты времени на выполнение каждой отдельной операции. В перспективе учетчики будут просто контролировать автоматический учет полевых работ и участвовать в других процессах в хозяйстве. Компьютерное моделирование в хозяйстве Компьютерное моделирование в текущем состоянии рассчитано на крупные холдинги, но в ближайшем будущем станет доступным широкому кругу сельскохозяйственных производителей. Первое направление – «Оптимизация структуры посевных площадей». Его цель – обеспечение максимальной доходности при соблюдении существующих ограничений: ● агрономических (предшественники, сроки возврата, непригодные площади и другие); ● рыночные (прогнозные цены, ограничения сбыта). Второе направление – «Оптимизация парка техники». Решаемая задача – моделирование оптимального «Плана полевых работ на сезон» и анализ прогнозного дефицита техники, обеспечивающего минимизацию расходов на выполнение работ при соблюдении комплекса ограничений: ● целевая структура посевов по полям; ● агротехнологии (состав и последовательность операций); ● доступность и производительность техники. На фоне ухода зарубежных производителей это особенно актуально: моделирование поможет выбрать какую технику и орудия купить, какие сцепки использовать, как загрузить имеющиеся машины максимально эффективно. Агроскаутинг с помощью дронов Как показывает практика, классический осмотр полей агрономом не дает точных сведений о засоренности полей. Так, если сорняк отчетливо не виден за культурой, он часто пропускается при визуальном осмотре человеком. К тому же, очаги сорняков не распределены равномерно: чаще всего они встречаются с краев или внутри поля в локальных точках и т. д. То есть, классический скаутинг требует модернизации. Эффективное решение для нового полевого сезона – агроскаутинг с помощью дронов. Чем же дрон лучше человека? Наглядно показывает статистика, собранная на практике: ● дрон облетает 100 га за 15 мин, а человек обходит за 1-1,5 часа; ● компьютер анализирует снимки в 6 раз быстрее человека; ● данные с дрона в 5 раз точнее, поскольку собираются с 10-20 точек, а человеком – только с двух. Контролем продолжает заниматься скаут – с планшета или пульта управления. Основные требования к персоналу минимальны – умение запустить дрон и быстрое перемещение между полями для сокращения сроков мониторинга. Вся информация передается в облачный сервис, с которым работает руководитель отдела: он может в любое время зайти в систему и посмотреть, какая ситуация на каком поле зафиксирована на основании распознавания снимков с дронов на текущий момент. Новинки электронных систем В 2023 году будут актуальны следующие новинки электронных систем: ● система оптимизации работы транспорта в поле – алгоритм, оценивающий характеристики поля и машин и выстраивающий оптимальный маршрут движения; ● система автоуправления – комплекс оборудования и ПО, снижающий трудоемкость сельскохозяйственных операций, количество пропусков и перекрытий, влияющий на экономию ГСМ и трудозатрат и обеспечивающий безостановочный цикл работы даже в условиях плохой видимости; ● ночное видение – система, позволяющая в ночное время увеличить обзор до 1500 м, повысив тем самым скорость транспорта на 50%, а производительность – на 30%; ● умные метки – специальные чипы, позволяющие легко идентифицировать любое оборудование (навесное или прицепное), используемое в сельском хозяйстве; ● Face ID – идентификация оператора транспортного средства по лицу, гарантирующая, что техникой управляет человек, имеющий на это право (на замену RFID-меток, которые таких гарантий не дают); ● картирование урожайности – аппаратно-программный комплекс на уборочной технике, позволяющий определить и зафиксировать количество собранного зерна за определенные промежутки времени; Все представленные выше новинки есть в каталоге отечественного поставщика решений для сельского хозяйства «Ростсельмаш». И в новом полевом сезоне их значение вырастет. Повышение урожайности за счет использования точных метеоданных Когда сельское хозяйство сталкивается с засушливым или морозным сезонами, важность метеоданных выходит на первый план. Современные станции позволяют определить, когда лучше всего проводить опрыскивание, с какой скоростью нужно двигаться технике при текущем ветре, как избежать риска «сжигания» урожая и т. д. Этими вопросами активно занимаются компании METOS и Pessl Instruments. Профессиональные метеостанции интегрируются с решениями отечественных поставщиков ПО, в том числе – «Истории поля» от «Геомира». Поступающие от них данные используются для оптимизации используемых ресурсов и повышения урожайности, его качества. Выводы Автоматизация и цифровизация способны решить сложившиеся в сельском хозяйстве проблемы безболезненно и быстро, включая передачу данных государственным надзорным органам, недостаточную квалификацию кадров и эффективность распределения ресурсов. В новом полевом сезоне выиграю компании, взявшие курс на активное внедрение новых технологий. -
 Контроль движения урожаяВ период уборки урожая потери могут достигать до 30%, как по причине неправильной работы механизаторов, так и из-за хищений в процессе уборки и транспортировки культур. Избежать этого позволит контроль движения урожая, обеспечивающий детальный учет на всех этапах уборочной компании, включая весовую. Внедрение модуля контроля снижает уровень махинаций с урожаем и повышает оперативность учета урожая, в том числе в разрезе по технике, полям, механизаторам. Что можем контролировать? Контроль за урожаем и его учет с последующим анализом и формированием отчетов, осуществляется на всех этапах уборочной компании: Уборка урожая комбайном, с контролем местоположения, идентификацией транспортного средства и водителя, движения техники и работы шнека, актуального уровня бункера или массы зерна. Работа бункера-перегрузчика с получением информации о его местоположение и фактическом весе урожая. Транспортировка зерна грузовой техникой с контролем веса зерна, местоположения транспорта и его перемещения, а также с распознаванием автомобиля и водителя. Отгрузка урожая на весовой с отслеживанием показателей электронных весов, опознаванием прибывшей техники и водителя. В процессе ведется сбор информации одновременно со всех модулей и дополнительно осуществляется видеоконтроль. Какое оборудование для контроля выбрать Для организации контроля за урожаем на комбайны, участвующее в процессе уборочной компании, устанавливают следующие датчики: датчик, измеряющий скорость вращения выгрузного шнека; датчик для определения уровня бункера; датчик вращения мотовил, необходимый для техники, на котором не установлен контроллер, определяющий синхронность движения мотовил и техники, влияющую на объемы собранного урожая; датчик угла наклона, который можно устанавливать на любые комбайны, независимо от возраста. На бункер-погрузчик интегрируют контроллер вращения выгрузного шнека, датчик веса и модуль для отслеживания местоположения и передачи данных. На грузовом транспорте и весовом, также устанавливают модуль определения фактического положения. Все перечисленные датчики и модули позволяют отслеживать широкий ряд показателей, которые настраиваются по требованию заказчика. При переходе на автоматизированную систему контроля движения урожая, первично ее работа дублируется талонами. Но, по мере доверия к работе системы, большинство заказчиков постепенно отказываются от талонов, что в результате способствует производительности уборочного процесса за счет его автоматизации. Основные схемы контроля движения урожая Схема контроля движения урожая базируется на основе технологических процессов и участников уборочной компании: Во время работы комбайна осуществляется контроль, позволяющий определить реальное местоположение и передвижение с постоянной передачей данных о фактическом объеме зерна в бункере. Одновременно определяется соотношение работы выгрузного-шнека и расхода зерна. Система автоматически определяет того, кто был за рулем, место выгрузки урожая в бункер-перегрузчик, блокировку работы шнека, точное время начала и окончания выгрузки. Перечисленная информация синхронизируется с данными, определяемыми на бункере-перегрузчике и зерновозе. При перемещении зерна в бункер-перегрузчик также, как и в комбайне, отслеживается положение техники, место выгрузки и загрузки, продолжительность этих процессов, факт блокировки шнека, актуальный вес зерна. Во время погрузки в зерновоз и транспортировки зерна на весовую контролирующие модули позволяют определять место загрузки, время, проведенное техникой в пути, возможные отклонения от маршрута, места незапланированных остановок. На весовую поступает информация от всех предыдущих блоков, где синхронизируется с данными, полученными с модулей весовой. Они идентифицируют грузовую технику и водителя, определяют вес нетто и брутто. В зависимости от потребностей, данная схема может быть реализована как в стандартном, так и упрощенном виде, без включения в уборочный процесс бункера-перегрузчика. В обоих случаях, будет реализован полный контроль с отображением движения урожая между всеми участниками процесса, который позволит фиксировать тревоги в случае выгрузки зерна комбайном, когда рядом с ним отсутствует зерновоз, допущенный к работе. По всем тревогам отображается не только место отгрузки урожая, но и причина, например прочистка бункера, неисправность рабочих узлов комбайна и пр. Используя данную систему с автоматической фиксацией всех показателей и расчетом тоннокилометров, можно быть уверенным в том, что весь рожай доедет без потерь до весовой Что дает автоматизация весовой и как связать эти данные с полями Интегрирование автоматизированной системы контроля движения урожая на весовой позволяет: в автоматическом режиме получать фактические показатели с электронных весов в реальном времени; рассчитывать весовые показатели раздельно: вес тары, брутто, нетто; считывать информацию штрих-кодов талонов для автоматического заполнения; распределять урожай по технике. Особенность контролирующего модуля для весовой заключается в том, что он может работать даже без подключения к интернету, накапливая всю информацию в процессе работы и передавая ее при появлении доступа к интернет-сети. На основе систематизированного сбора данных формируются отчеты, включающие в себя: реестр приема зерна от водителя грузовой техники; ведомость движения зерна; реестр приема урожая на весовой; выписка из реестра о намолотом зерне. Использование информации со спутников при планировании уборки Благодаря высокоточным контроллерам и модулям передачи данных, система контроля движения урожая делает возможными планирование уборочных мероприятий с помощью спутниковых снимков и индекса NDVI. Его снижение напрямую связано с активностью созревания культур. Чтобы избежать уборки несозревшего урожая, следует ориентироваться на уровень индекса: чем ниже этот показатель, тем суше будет зерно. Как собрать данные для ФГИС Зерно Для прощения формирования отчета для ФГИС Зерно, настраивается автоматический сбор следующих данных: сведения о виде права, на засеянный земельный участок, с которого осуществлялся сбор зерновых культур; вид сельскохозяйственной культуры; общая площадь гектар земельного участка, с которой собрали урожай; место выращивания конкретной партии зерна; общая масса зерна в килограммах (нетто), собранная за день уборочных работ; Также, необходимо указать место, где будет храниться зерно.
Контроль движения урожаяВ период уборки урожая потери могут достигать до 30%, как по причине неправильной работы механизаторов, так и из-за хищений в процессе уборки и транспортировки культур. Избежать этого позволит контроль движения урожая, обеспечивающий детальный учет на всех этапах уборочной компании, включая весовую. Внедрение модуля контроля снижает уровень махинаций с урожаем и повышает оперативность учета урожая, в том числе в разрезе по технике, полям, механизаторам. Что можем контролировать? Контроль за урожаем и его учет с последующим анализом и формированием отчетов, осуществляется на всех этапах уборочной компании: Уборка урожая комбайном, с контролем местоположения, идентификацией транспортного средства и водителя, движения техники и работы шнека, актуального уровня бункера или массы зерна. Работа бункера-перегрузчика с получением информации о его местоположение и фактическом весе урожая. Транспортировка зерна грузовой техникой с контролем веса зерна, местоположения транспорта и его перемещения, а также с распознаванием автомобиля и водителя. Отгрузка урожая на весовой с отслеживанием показателей электронных весов, опознаванием прибывшей техники и водителя. В процессе ведется сбор информации одновременно со всех модулей и дополнительно осуществляется видеоконтроль. Какое оборудование для контроля выбрать Для организации контроля за урожаем на комбайны, участвующее в процессе уборочной компании, устанавливают следующие датчики: датчик, измеряющий скорость вращения выгрузного шнека; датчик для определения уровня бункера; датчик вращения мотовил, необходимый для техники, на котором не установлен контроллер, определяющий синхронность движения мотовил и техники, влияющую на объемы собранного урожая; датчик угла наклона, который можно устанавливать на любые комбайны, независимо от возраста. На бункер-погрузчик интегрируют контроллер вращения выгрузного шнека, датчик веса и модуль для отслеживания местоположения и передачи данных. На грузовом транспорте и весовом, также устанавливают модуль определения фактического положения. Все перечисленные датчики и модули позволяют отслеживать широкий ряд показателей, которые настраиваются по требованию заказчика. При переходе на автоматизированную систему контроля движения урожая, первично ее работа дублируется талонами. Но, по мере доверия к работе системы, большинство заказчиков постепенно отказываются от талонов, что в результате способствует производительности уборочного процесса за счет его автоматизации. Основные схемы контроля движения урожая Схема контроля движения урожая базируется на основе технологических процессов и участников уборочной компании: Во время работы комбайна осуществляется контроль, позволяющий определить реальное местоположение и передвижение с постоянной передачей данных о фактическом объеме зерна в бункере. Одновременно определяется соотношение работы выгрузного-шнека и расхода зерна. Система автоматически определяет того, кто был за рулем, место выгрузки урожая в бункер-перегрузчик, блокировку работы шнека, точное время начала и окончания выгрузки. Перечисленная информация синхронизируется с данными, определяемыми на бункере-перегрузчике и зерновозе. При перемещении зерна в бункер-перегрузчик также, как и в комбайне, отслеживается положение техники, место выгрузки и загрузки, продолжительность этих процессов, факт блокировки шнека, актуальный вес зерна. Во время погрузки в зерновоз и транспортировки зерна на весовую контролирующие модули позволяют определять место загрузки, время, проведенное техникой в пути, возможные отклонения от маршрута, места незапланированных остановок. На весовую поступает информация от всех предыдущих блоков, где синхронизируется с данными, полученными с модулей весовой. Они идентифицируют грузовую технику и водителя, определяют вес нетто и брутто. В зависимости от потребностей, данная схема может быть реализована как в стандартном, так и упрощенном виде, без включения в уборочный процесс бункера-перегрузчика. В обоих случаях, будет реализован полный контроль с отображением движения урожая между всеми участниками процесса, который позволит фиксировать тревоги в случае выгрузки зерна комбайном, когда рядом с ним отсутствует зерновоз, допущенный к работе. По всем тревогам отображается не только место отгрузки урожая, но и причина, например прочистка бункера, неисправность рабочих узлов комбайна и пр. Используя данную систему с автоматической фиксацией всех показателей и расчетом тоннокилометров, можно быть уверенным в том, что весь рожай доедет без потерь до весовой Что дает автоматизация весовой и как связать эти данные с полями Интегрирование автоматизированной системы контроля движения урожая на весовой позволяет: в автоматическом режиме получать фактические показатели с электронных весов в реальном времени; рассчитывать весовые показатели раздельно: вес тары, брутто, нетто; считывать информацию штрих-кодов талонов для автоматического заполнения; распределять урожай по технике. Особенность контролирующего модуля для весовой заключается в том, что он может работать даже без подключения к интернету, накапливая всю информацию в процессе работы и передавая ее при появлении доступа к интернет-сети. На основе систематизированного сбора данных формируются отчеты, включающие в себя: реестр приема зерна от водителя грузовой техники; ведомость движения зерна; реестр приема урожая на весовой; выписка из реестра о намолотом зерне. Использование информации со спутников при планировании уборки Благодаря высокоточным контроллерам и модулям передачи данных, система контроля движения урожая делает возможными планирование уборочных мероприятий с помощью спутниковых снимков и индекса NDVI. Его снижение напрямую связано с активностью созревания культур. Чтобы избежать уборки несозревшего урожая, следует ориентироваться на уровень индекса: чем ниже этот показатель, тем суше будет зерно. Как собрать данные для ФГИС Зерно Для прощения формирования отчета для ФГИС Зерно, настраивается автоматический сбор следующих данных: сведения о виде права, на засеянный земельный участок, с которого осуществлялся сбор зерновых культур; вид сельскохозяйственной культуры; общая площадь гектар земельного участка, с которой собрали урожай; место выращивания конкретной партии зерна; общая масса зерна в килограммах (нетто), собранная за день уборочных работ; Также, необходимо указать место, где будет храниться зерно. -
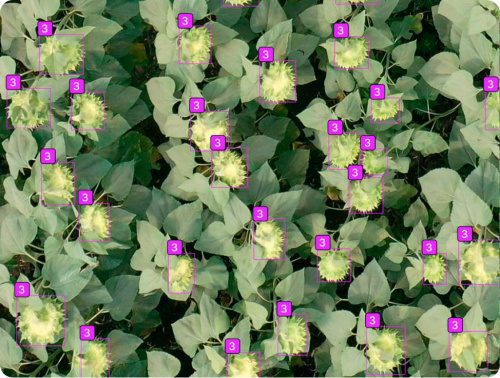 Умные дроны для агрономовДроны все чаще используют в самых разнообразных сферах и сельское хозяйство не исключение. До массового применения беспилотников аграриями еще далеко, но уже сегодня наша компания видит большой интерес к этой теме.Часто возникают вопросы о том какую информацию можно получить с помощью дронов, как выбрать беспилотник для решения конкретных задач. Многих аграриев беспокоит необходимость соблюдения законности полетов над полями, большое количество получаемых снимков и отсутствие квалифицированных сотрудников, умеющих управлять летательным аппаратом. Предлагаем разобраться с этими вопросами подробнее. Виды беспилотников В сельском хозяйстве применяют БПЛА двух типов: Беспилотники самолетного типа – техника для продолжительных полетов с большим ресурсом аккумуляторных батарей. Заряда БПЛА хватает на беспрерывный полет в течение 4.5 часов, что позволяет получить высокую производительность – до 10 тыс. гектаров в день. Этот вариант считается наиболее удобным для облета крупных территорий с площадью от 5 тыс. га. Но, для его использования необходима команда из нескольких человек, которая бы занималась запуском и управлением беспилотника. Кроме того, самолетный дрон, из-за особенностей конструкции не может вести съемку на низкой высоте и не может зависать в одной точке. Беспилотники мультироторного типа – аппарат, длительность полета которого варьируется от 25 до 60 минут в зависимости от модификации. Производительность таких дронов достигает до 2 тыс. гектар в день. Они имеют компактные размеры, благодаря которым легко помещаются в сумке. Квадрокоптеры просты в конструкции и управлении. Они могут зависать в одной точке, что делает их незаменимыми для точечной съемки. Но, из-за небольшого запаса заряда аккумулятора, площадь съемки за один полет ограничена, поэтому мультироторные беспилотники лучше всего подойдут для сплошной или точечной съемки территорий с площадью до 5 тыс. га. Основные задачи, решаемые с помощью дронов Беспилотники с интеллектуальным программным обеспечением применяют для выполнения следующих мероприятий: инвентаризации земель с построением высокоточных электронных карт полей; построения цифровых моделей поверхностей с различным рельефом; оценки качества и результата посева с подсчетом количества всходов, оценкой их взаимного расположения; мониторинга состояния посевов с возможностью получения данных в любую погоду без необходимости получения спутниковых снимков и выделением проблемных зон на полях; идентификации сорняков на полях; оценки состояния посевов перед их уборкой; видеомониторинга проведения уборочных работ. Автоматизация осмотров с помощью дронов Важное преимущество дронов в сельском хозяйстве заключается в том, что для управления, аналитики и других работ уже разработаны специальные аналитические платформы, которые берут на себя многие процессы. Одна их таких интеллектуальных платформ - «АссистАгро». Что может такая платформа: Система «АссистАгро» осуществляет сбор информации с использованием метеоданных, и спутниковых снимков, и на основе полученных данных рекомендует задачи и даты осмотров полей. Сотрудник запускает БПЛА для обследования полей по заданному маршруту и устройство в автоматическом режиме собирает данные. Маршрут облета выстраивается в автоматическом режиме по последним спутниковым снимкам с обеспечением равномерности облета всех зон. Сформированное полетное задание не нужно загружать. Оно автоматически передается на дрон, который нужно лишь запустить сотруднику, нажав кнопку пуска на пульте. Модуль обработки информации анализирует полученные изображения, распознавая сорняки и определяя их семейства, а также подсчитывая общее количество сорной и культурной растительности на гектар. При этом все данные визуализируются на карте, в том числе и семейства сорняков, которые выделяются маркерами разных оттенков и соответствующими названиями. После анализа данных программа формирует рекомендации не только по срокам и технологии обработки посевов, но и наиболее эффективным баковым гербицидным смесям. Все рекомендации, в свою очередь, в виде отчета получает агроном, который проводит работы и необходимые мероприятия в соответствии с предоставленными данными. Подсчет густоты и идентификация сорняков Густота сахарной свеклы 9.2 шт/м2 Количество сорных растений 46 шт/м2 Автоматический подсчет густоты подсолнечника Густота подсолнечника 92 тыс. шт./га Рапознавание семейст сорняков Экономическая эффективность Опыт применения умных дронов в сельском хозяйстве показал, что благодаря своевременному обнаружению сорняков и точному анализу, урожайность повышалась в среднем на 10%. К положительным результатам привели и рекомендации, касающиеся технологий, зон и препаратов для обработки. Благодаря выборочной обработке полей правильно подобранными гербицидами, общие затраты сократились до 20%. Даже с учетом затрат на облет полей беспилотниками и анализ результатов съемок, выгода очевидна. Визуализация на карте результатов распознавания снимков по полям. С чего начать использование умных дронов в своем хозяйстве Для применения умных дронов достаточно выбрать один из способов действий: Заказать съемку полей беспилотником и подключить платформу «АссистАгро». Приобрести дрон для автоматического облета территорий Альбатрос Д1 или DJI Mavic 2 и подключить платформу «АссистАгро». Использовать любой дрон, способный обеспечить заданное высокое разрешение снимков, и подключить платформу «АссистАгро». Независимо от выбора действий, для облета полей БПЛА необходимо получать официальное разрешение. Для этого следует подать заявку в Зональный центр Организации Воздушного Движения на разрешение использования воздушного пространства. Непосредственно в день облета, необходимо по телефону оповестить организацию о готовности к проведению работ, минимум за два часа. Затем следует доложить о начале проведения работ в воздушном пространстве после взлета дрона, а также об их окончании после приземления. Но, прежде чем задумываться о применении умного дрона, необходимо определить статус своего поля, используя карту зон воздушного пространства РФ. Если поле находится вблизи аэропорта, государственной границы или военной зоны, получить разрешение на полет БПЛА будет значительно сложнее. Преимущества применения дронов в хозяйстве Использование умного беспилотника в сельском хозяйстве – это не только возможность своевременного обнаружения сорняков, но и другие плюсы. Регулярные облеты полей, сбор и анализ данных позволяют: Постоянно контролировать поля на всех этапах производственного процесса, начиная от подготовки почвы к севу и заканчивая сбором урожая. Повышать точность осуществляемых работ на полях и скорость их выполнения. Получать актуальную информацию о качестве выполняемых операций своевременно их корректировать. Использовать результаты автоматического анализа высокоточных снимков полей и реализовывать рекомендации. Благодаря использованию дронов, вы сможете увидеть объемную и детальную информацию о состоянии посевов и будете иметь точные планы действий, которые позволят оптимизировать процессы и добиться максимальной эффективности в сельскохозяйственной деятельности.
Умные дроны для агрономовДроны все чаще используют в самых разнообразных сферах и сельское хозяйство не исключение. До массового применения беспилотников аграриями еще далеко, но уже сегодня наша компания видит большой интерес к этой теме.Часто возникают вопросы о том какую информацию можно получить с помощью дронов, как выбрать беспилотник для решения конкретных задач. Многих аграриев беспокоит необходимость соблюдения законности полетов над полями, большое количество получаемых снимков и отсутствие квалифицированных сотрудников, умеющих управлять летательным аппаратом. Предлагаем разобраться с этими вопросами подробнее. Виды беспилотников В сельском хозяйстве применяют БПЛА двух типов: Беспилотники самолетного типа – техника для продолжительных полетов с большим ресурсом аккумуляторных батарей. Заряда БПЛА хватает на беспрерывный полет в течение 4.5 часов, что позволяет получить высокую производительность – до 10 тыс. гектаров в день. Этот вариант считается наиболее удобным для облета крупных территорий с площадью от 5 тыс. га. Но, для его использования необходима команда из нескольких человек, которая бы занималась запуском и управлением беспилотника. Кроме того, самолетный дрон, из-за особенностей конструкции не может вести съемку на низкой высоте и не может зависать в одной точке. Беспилотники мультироторного типа – аппарат, длительность полета которого варьируется от 25 до 60 минут в зависимости от модификации. Производительность таких дронов достигает до 2 тыс. гектар в день. Они имеют компактные размеры, благодаря которым легко помещаются в сумке. Квадрокоптеры просты в конструкции и управлении. Они могут зависать в одной точке, что делает их незаменимыми для точечной съемки. Но, из-за небольшого запаса заряда аккумулятора, площадь съемки за один полет ограничена, поэтому мультироторные беспилотники лучше всего подойдут для сплошной или точечной съемки территорий с площадью до 5 тыс. га. Основные задачи, решаемые с помощью дронов Беспилотники с интеллектуальным программным обеспечением применяют для выполнения следующих мероприятий: инвентаризации земель с построением высокоточных электронных карт полей; построения цифровых моделей поверхностей с различным рельефом; оценки качества и результата посева с подсчетом количества всходов, оценкой их взаимного расположения; мониторинга состояния посевов с возможностью получения данных в любую погоду без необходимости получения спутниковых снимков и выделением проблемных зон на полях; идентификации сорняков на полях; оценки состояния посевов перед их уборкой; видеомониторинга проведения уборочных работ. Автоматизация осмотров с помощью дронов Важное преимущество дронов в сельском хозяйстве заключается в том, что для управления, аналитики и других работ уже разработаны специальные аналитические платформы, которые берут на себя многие процессы. Одна их таких интеллектуальных платформ - «АссистАгро». Что может такая платформа: Система «АссистАгро» осуществляет сбор информации с использованием метеоданных, и спутниковых снимков, и на основе полученных данных рекомендует задачи и даты осмотров полей. Сотрудник запускает БПЛА для обследования полей по заданному маршруту и устройство в автоматическом режиме собирает данные. Маршрут облета выстраивается в автоматическом режиме по последним спутниковым снимкам с обеспечением равномерности облета всех зон. Сформированное полетное задание не нужно загружать. Оно автоматически передается на дрон, который нужно лишь запустить сотруднику, нажав кнопку пуска на пульте. Модуль обработки информации анализирует полученные изображения, распознавая сорняки и определяя их семейства, а также подсчитывая общее количество сорной и культурной растительности на гектар. При этом все данные визуализируются на карте, в том числе и семейства сорняков, которые выделяются маркерами разных оттенков и соответствующими названиями. После анализа данных программа формирует рекомендации не только по срокам и технологии обработки посевов, но и наиболее эффективным баковым гербицидным смесям. Все рекомендации, в свою очередь, в виде отчета получает агроном, который проводит работы и необходимые мероприятия в соответствии с предоставленными данными. Подсчет густоты и идентификация сорняков Густота сахарной свеклы 9.2 шт/м2 Количество сорных растений 46 шт/м2 Автоматический подсчет густоты подсолнечника Густота подсолнечника 92 тыс. шт./га Рапознавание семейст сорняков Экономическая эффективность Опыт применения умных дронов в сельском хозяйстве показал, что благодаря своевременному обнаружению сорняков и точному анализу, урожайность повышалась в среднем на 10%. К положительным результатам привели и рекомендации, касающиеся технологий, зон и препаратов для обработки. Благодаря выборочной обработке полей правильно подобранными гербицидами, общие затраты сократились до 20%. Даже с учетом затрат на облет полей беспилотниками и анализ результатов съемок, выгода очевидна. Визуализация на карте результатов распознавания снимков по полям. С чего начать использование умных дронов в своем хозяйстве Для применения умных дронов достаточно выбрать один из способов действий: Заказать съемку полей беспилотником и подключить платформу «АссистАгро». Приобрести дрон для автоматического облета территорий Альбатрос Д1 или DJI Mavic 2 и подключить платформу «АссистАгро». Использовать любой дрон, способный обеспечить заданное высокое разрешение снимков, и подключить платформу «АссистАгро». Независимо от выбора действий, для облета полей БПЛА необходимо получать официальное разрешение. Для этого следует подать заявку в Зональный центр Организации Воздушного Движения на разрешение использования воздушного пространства. Непосредственно в день облета, необходимо по телефону оповестить организацию о готовности к проведению работ, минимум за два часа. Затем следует доложить о начале проведения работ в воздушном пространстве после взлета дрона, а также об их окончании после приземления. Но, прежде чем задумываться о применении умного дрона, необходимо определить статус своего поля, используя карту зон воздушного пространства РФ. Если поле находится вблизи аэропорта, государственной границы или военной зоны, получить разрешение на полет БПЛА будет значительно сложнее. Преимущества применения дронов в хозяйстве Использование умного беспилотника в сельском хозяйстве – это не только возможность своевременного обнаружения сорняков, но и другие плюсы. Регулярные облеты полей, сбор и анализ данных позволяют: Постоянно контролировать поля на всех этапах производственного процесса, начиная от подготовки почвы к севу и заканчивая сбором урожая. Повышать точность осуществляемых работ на полях и скорость их выполнения. Получать актуальную информацию о качестве выполняемых операций своевременно их корректировать. Использовать результаты автоматического анализа высокоточных снимков полей и реализовывать рекомендации. Благодаря использованию дронов, вы сможете увидеть объемную и детальную информацию о состоянии посевов и будете иметь точные планы действий, которые позволят оптимизировать процессы и добиться максимальной эффективности в сельскохозяйственной деятельности. -
 Как собрать дополнительную информацию с помощью терминалов мониторинга?Какую дополнительную информацию можно получать с помощью терминалов мониторинга помимо местоположения и топлива? Подключение дополнительного оборудования к терминалам мониторинга техники позволяет получать полезную информацию по работе в полях. Однако очень небольшой процент сельхозпроизводителей пользуются данными возможностями. Что же можно получать на разных этапах полевых работ? На этапе обработки почвы при установке дополнительного датчика появляется возможность контролировать глубину заглубления орудия с точностью 1 см. Эти данные позволяют построить карту заглубления орудия на поле и раскрасить ее по глубине. На этапе сева возможно подключение к сеялкам через Can шину или же установка систем контроля высева. В этом случае прежде всего добавляется информация по норме высева, количестве посеянных семян и забитых сошняках. Это позволяет контролировать качество работы механизаторов и понимать расход посевного материала в режиме реального времени. На этапе обработки посевов по Can шине или путем установки дополнительных датчиков появляются данные по нормам внесения химикатов и карты внесения. При использовании дифференцированного внесения эти данные позволяют быстро оценить правильно ли отработала техника по карте заданию. Также это позволяет контролировать расход химикатов в режиме реального времени и понимать сколько их всего затрачено на каждое поле. На этапе уборки по Can шине или с дополнительных датчиков комбайнов считываются данные по работе шнека и объему зерна в бункере. Это позволяет определить все места выгрузок комбайнов и организовать контроль движения урожая от поля до весовой. Использование этих данных позволяет контролировать не только количественные параметры работы техники на полях (обработанную площадь, время работы, пройденный путь), но и параметры работы самого орудия. Эта информация позволит вывести на новый уровень понимание того, что происходит на полях и как качественно выполняют свою работу механизаторы.
Как собрать дополнительную информацию с помощью терминалов мониторинга?Какую дополнительную информацию можно получать с помощью терминалов мониторинга помимо местоположения и топлива? Подключение дополнительного оборудования к терминалам мониторинга техники позволяет получать полезную информацию по работе в полях. Однако очень небольшой процент сельхозпроизводителей пользуются данными возможностями. Что же можно получать на разных этапах полевых работ? На этапе обработки почвы при установке дополнительного датчика появляется возможность контролировать глубину заглубления орудия с точностью 1 см. Эти данные позволяют построить карту заглубления орудия на поле и раскрасить ее по глубине. На этапе сева возможно подключение к сеялкам через Can шину или же установка систем контроля высева. В этом случае прежде всего добавляется информация по норме высева, количестве посеянных семян и забитых сошняках. Это позволяет контролировать качество работы механизаторов и понимать расход посевного материала в режиме реального времени. На этапе обработки посевов по Can шине или путем установки дополнительных датчиков появляются данные по нормам внесения химикатов и карты внесения. При использовании дифференцированного внесения эти данные позволяют быстро оценить правильно ли отработала техника по карте заданию. Также это позволяет контролировать расход химикатов в режиме реального времени и понимать сколько их всего затрачено на каждое поле. На этапе уборки по Can шине или с дополнительных датчиков комбайнов считываются данные по работе шнека и объему зерна в бункере. Это позволяет определить все места выгрузок комбайнов и организовать контроль движения урожая от поля до весовой. Использование этих данных позволяет контролировать не только количественные параметры работы техники на полях (обработанную площадь, время работы, пройденный путь), но и параметры работы самого орудия. Эта информация позволит вывести на новый уровень понимание того, что происходит на полях и как качественно выполняют свою работу механизаторы. -
 Стратегии устойчивой защиты растений от болезней: своевременно защитите ваш урожайАвтор: Кристина Пилц, менеджер по решениям для мониторинга вредителей и болезней, Pessl Instruments Возникновение грибкового заболевания зависит от одновременного взаимодействия следующих факторов: грибковый патоген должен вступить в контакт с восприимчивым растением-хозяином при благоприятных условиях окружающей среды. ТЯЖЕСТЬ ЗАБОЛЕВАНИЯ На тяжесть заболевания влияют: ● сорт растений (одни гибриды более чувствительны, чем другие); ● посевной материал/количество инфекционных спор (севооборот); ● условия окружающей среды (например: сильный дождь распространяет споры на более обширной территории, длительное время увлажнения листьев); ● Севооборот и подготовка к зиме (перезимовка на пожнивных остатках, обработка почвы). Основным фактором заражения и развития грибковых возбудителей являются погодные условия. Влажность в виде дождя, высокая относительная влажность, влажность листьев, роса или туман способствуют развитию болезни, а более высокая температура в эти влажные периоды ускоряют процесс развития инфекции. ГРАФИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ РИСКА БОЛЕЗНИ На графике отображается общую модель риска поражения колоса (желтый цвет) и вероятность возникновения инфекции (зеленый), указывая дату (часовые интервалы) возникновения риска инфекций в полевых условиях. Применении данных о риске возникновения инфекции и последующие действия зависят от стратегии защиты растений. При риске от 60% до 70% предполагается превентивная обработка, а при 100% уже лечение. Подробная информация о биологии возбудителя, модели, используемой для определения риска, и рекомендации можно найти в на сайте iMetos. Широкий спектр аппаратных решений под брендом iMETOS предоставляет возможность эффективного и экономичного мониторинга окружающей среды. Все измеренные значения могут быть ассимилированы в прогноз погоды для конкретного поля и доступны практически в реальном времени на устройстве через платформу FieldClimate. ПРЕИМУЩЕСТВА И ПРЕИМУЩЕСТВА IMETOS: ● Экономьте время и деньги, используя решения для мониторинга в режиме реального времени ● Начинайте работу только с соблюдением надлежащих условий ● Мониторинг применения технических условий в при климатических изменениям. ● Высокоточный прогноз погоды для принятия правильного решения в нужное время ● Инструменты планирования технологических окон
Стратегии устойчивой защиты растений от болезней: своевременно защитите ваш урожайАвтор: Кристина Пилц, менеджер по решениям для мониторинга вредителей и болезней, Pessl Instruments Возникновение грибкового заболевания зависит от одновременного взаимодействия следующих факторов: грибковый патоген должен вступить в контакт с восприимчивым растением-хозяином при благоприятных условиях окружающей среды. ТЯЖЕСТЬ ЗАБОЛЕВАНИЯ На тяжесть заболевания влияют: ● сорт растений (одни гибриды более чувствительны, чем другие); ● посевной материал/количество инфекционных спор (севооборот); ● условия окружающей среды (например: сильный дождь распространяет споры на более обширной территории, длительное время увлажнения листьев); ● Севооборот и подготовка к зиме (перезимовка на пожнивных остатках, обработка почвы). Основным фактором заражения и развития грибковых возбудителей являются погодные условия. Влажность в виде дождя, высокая относительная влажность, влажность листьев, роса или туман способствуют развитию болезни, а более высокая температура в эти влажные периоды ускоряют процесс развития инфекции. ГРАФИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ РИСКА БОЛЕЗНИ На графике отображается общую модель риска поражения колоса (желтый цвет) и вероятность возникновения инфекции (зеленый), указывая дату (часовые интервалы) возникновения риска инфекций в полевых условиях. Применении данных о риске возникновения инфекции и последующие действия зависят от стратегии защиты растений. При риске от 60% до 70% предполагается превентивная обработка, а при 100% уже лечение. Подробная информация о биологии возбудителя, модели, используемой для определения риска, и рекомендации можно найти в на сайте iMetos. Широкий спектр аппаратных решений под брендом iMETOS предоставляет возможность эффективного и экономичного мониторинга окружающей среды. Все измеренные значения могут быть ассимилированы в прогноз погоды для конкретного поля и доступны практически в реальном времени на устройстве через платформу FieldClimate. ПРЕИМУЩЕСТВА И ПРЕИМУЩЕСТВА IMETOS: ● Экономьте время и деньги, используя решения для мониторинга в режиме реального времени ● Начинайте работу только с соблюдением надлежащих условий ● Мониторинг применения технических условий в при климатических изменениям. ● Высокоточный прогноз погоды для принятия правильного решения в нужное время ● Инструменты планирования технологических окон -
 Мониторинг влажности почвы и планирование циклов поливаСогласно прогнозам, мировое производство картофеля будет расти в среднем на 1,06% в течение прогнозируемого периода (2021-2025 гг.). Фактически, менее 50% картофеля, выращиваемого во всем мире, потребляется в свежем виде. Остальная часть потребляется пищевой промышленностью, которая выступает в качестве основной движущей силы роста рынка картофеля. Более того, это также действует как строгий спрос на стандартизацию продукции. ПРОИЗВОДИТЕЛЬ КАРТОФЕЛЯ, ИСПОЛЬЗУЮЩИЙ РЕШЕНИЯ METOS Размер хозяйства: 500 га картофеля + 7.000 га кукурузы и других культур на орошаемых полях. Вид культуры: картофель сорт ВР 808 Типы датчиков: Sentek SE 600 + станция ET0 Основные приложения: Farmview Irrimet для принятия решений об орошении и спутниковые снимки для отслеживания развития сельскохозяйственных культур. Польза от FarmView: в условиях водного стресса во время засухи фермер мог видеть, в какие моменты требовалось разумное использование воды, с общим увеличением урожайности с 36 до 43 т/га. ВЫЗОВЫ ПРИ ВЫРАЩИВАНИЯ КАРТОФЕЛЯ “2020 и 2021 годы были очень сложными из-за засухи. Если раньше мы использовали для полива не более 4,5 тыс. м3/Га, то в прошлых сезонах как по картофелю, так и по кукурузе использовали почти 7 тыс. м3/Га. При этом автоматические датчики и спутниковые снимки по-прежнему фиксировали недостаток влаги, то есть мы даже не всегда могли возместить затраты растений на транспирацию. Несмотря на все это, результаты мониторинга показали нам, что в сложных погодных условиях единственным надежным решением будет наличие датчиков в почве для измерения данных в реальном времени с ежедневным контролем”. Чтобы соответствовать критериям индустрии картофеля фри, клубни картофеля должны в равной степени соответствовать стандартам размера и качества. График Irrimet свидетельствует о том, что начальный посев был богарным, после чего с конца мая по сентябрь было очень мало дождя. Чтобы противостоять засухе, с июня проводятся ирригационные мероприятия. Начиная с середины сезона, пороговые значения полива поддерживались на уровне 1/3 от значений полевой влагоемкости (верхняя синяя линия), хотя увеличивались по количеству дней, как показано на втором графике ниже. Картофель является чувствительной культурой, где водный стресс в течение 12-24 часов на стадиях вегетативной фазы может привести к потере 20% урожая или снижению качества клубней. В то время как чрезмерно влажные почвы могут вызвать возбудителей гниения клубней, таких как гниль. Контроль водного баланса почвы позволяет производителям регулировать уровень воды в соответствии с развитием сельскохозяйственных культур во всех типах ситуаций, включая засуху. В условиях водного стресса производителям необходимо полагаться на наличие воды для полива. Таким образом, каждая капля воды из резервуаров имеет значение для достижения желаемого урожая. “2020 год был сложным переходным годом, когда нам пришлось научиться использовать больше воды, чтобы сохранить урожай здоровым и живым ... раньше это никогда не было большой проблемой для нас. Несмотря на все проблемы борьбы с нестабильной погодой, поддержка данных Irrimet помогла нам повысить урожайность (с 36 до 43 т/Га при росте прибыли примерно на 1500 долларов США/Га).” Использование спутниковых снимков для управления динамикой растительности Спутник показывает культуру картофеля в форме прямоугольника как часть полной зоны урожая с террасной структурой. Зонирование данных по зонам сельскохозяйственных культур помогает пользователям действовать на местном уровне с большей точностью, избегая равного применения химикатов, полива, питательных веществ и т. д. Средняя биомасса достигла 2,6 шестого июля. На картофельных полях обычно одновременно высаживают разные сорта клубней. На изображениях ниже показаны две параллельные культуры в одной и той же зоне сельскохозяйственных культур: одна культура картофеля с развитием биомассы с 06/07 по 01/09, готовая к уборке (более зеленый диапазон); а на другом изображена оголенная почва с подготовкой поля к посеву (розовый прямоугольник).
Мониторинг влажности почвы и планирование циклов поливаСогласно прогнозам, мировое производство картофеля будет расти в среднем на 1,06% в течение прогнозируемого периода (2021-2025 гг.). Фактически, менее 50% картофеля, выращиваемого во всем мире, потребляется в свежем виде. Остальная часть потребляется пищевой промышленностью, которая выступает в качестве основной движущей силы роста рынка картофеля. Более того, это также действует как строгий спрос на стандартизацию продукции. ПРОИЗВОДИТЕЛЬ КАРТОФЕЛЯ, ИСПОЛЬЗУЮЩИЙ РЕШЕНИЯ METOS Размер хозяйства: 500 га картофеля + 7.000 га кукурузы и других культур на орошаемых полях. Вид культуры: картофель сорт ВР 808 Типы датчиков: Sentek SE 600 + станция ET0 Основные приложения: Farmview Irrimet для принятия решений об орошении и спутниковые снимки для отслеживания развития сельскохозяйственных культур. Польза от FarmView: в условиях водного стресса во время засухи фермер мог видеть, в какие моменты требовалось разумное использование воды, с общим увеличением урожайности с 36 до 43 т/га. ВЫЗОВЫ ПРИ ВЫРАЩИВАНИЯ КАРТОФЕЛЯ “2020 и 2021 годы были очень сложными из-за засухи. Если раньше мы использовали для полива не более 4,5 тыс. м3/Га, то в прошлых сезонах как по картофелю, так и по кукурузе использовали почти 7 тыс. м3/Га. При этом автоматические датчики и спутниковые снимки по-прежнему фиксировали недостаток влаги, то есть мы даже не всегда могли возместить затраты растений на транспирацию. Несмотря на все это, результаты мониторинга показали нам, что в сложных погодных условиях единственным надежным решением будет наличие датчиков в почве для измерения данных в реальном времени с ежедневным контролем”. Чтобы соответствовать критериям индустрии картофеля фри, клубни картофеля должны в равной степени соответствовать стандартам размера и качества. График Irrimet свидетельствует о том, что начальный посев был богарным, после чего с конца мая по сентябрь было очень мало дождя. Чтобы противостоять засухе, с июня проводятся ирригационные мероприятия. Начиная с середины сезона, пороговые значения полива поддерживались на уровне 1/3 от значений полевой влагоемкости (верхняя синяя линия), хотя увеличивались по количеству дней, как показано на втором графике ниже. Картофель является чувствительной культурой, где водный стресс в течение 12-24 часов на стадиях вегетативной фазы может привести к потере 20% урожая или снижению качества клубней. В то время как чрезмерно влажные почвы могут вызвать возбудителей гниения клубней, таких как гниль. Контроль водного баланса почвы позволяет производителям регулировать уровень воды в соответствии с развитием сельскохозяйственных культур во всех типах ситуаций, включая засуху. В условиях водного стресса производителям необходимо полагаться на наличие воды для полива. Таким образом, каждая капля воды из резервуаров имеет значение для достижения желаемого урожая. “2020 год был сложным переходным годом, когда нам пришлось научиться использовать больше воды, чтобы сохранить урожай здоровым и живым ... раньше это никогда не было большой проблемой для нас. Несмотря на все проблемы борьбы с нестабильной погодой, поддержка данных Irrimet помогла нам повысить урожайность (с 36 до 43 т/Га при росте прибыли примерно на 1500 долларов США/Га).” Использование спутниковых снимков для управления динамикой растительности Спутник показывает культуру картофеля в форме прямоугольника как часть полной зоны урожая с террасной структурой. Зонирование данных по зонам сельскохозяйственных культур помогает пользователям действовать на местном уровне с большей точностью, избегая равного применения химикатов, полива, питательных веществ и т. д. Средняя биомасса достигла 2,6 шестого июля. На картофельных полях обычно одновременно высаживают разные сорта клубней. На изображениях ниже показаны две параллельные культуры в одной и той же зоне сельскохозяйственных культур: одна культура картофеля с развитием биомассы с 06/07 по 01/09, готовая к уборке (более зеленый диапазон); а на другом изображена оголенная почва с подготовкой поля к посеву (розовый прямоугольник). -
 Отчет по сканированию поля на базе сканера почвы от Pessl InstrumentsВводные данные 14.10.2021 представителями компании Pessl Instruments и Фолворт Консультант было проведено сканирование почвы участка поля в 100 гектар (далее “ выбранный участок поля”) для решения следующих задач: 1. Определение степени разнородности/уплотненности почвы в выбранном участке 2. Определение вертикальной разнородности почвы: Определение наблюдаемой электропроводности;* Определение относительной влажности; Определение относительной засолености; Выявление неоднородностей в распределении этих параметров в горизонтальном и вертикальном разрезах. * Наблюдаемая электропроводность отличается от электропроводности, получаемой в лабораторных условиях. Для более детального изучения см. здесь. 3. Определение относительного объемного содержания влаги в почве на выбранном участке поля: Измерение относительного влагоудерживающего потенциала почвы; Выявление текущего относительного содержания объемного содержания влаги; Зонирование поля по сухим, увлажненным и переувлажненным участкам. 4. Определение относительной степени засоленности почвы на 4х почвенных профилях (0-20, 20-40, 40-60, 60-80 см). 5. Формирование рекомендаций для технического оснащения средствами мониторинга влажности почвы в соответствии с спецификой поля и потребностями культур, а также систем полива. Важно: Сканирование проводилось почвенным сканером с измерением электромагнитной индукции. Почва сканируется на глубину до 100 см, где получаемый сигнал анализируется с помощью проверенных математических моделей для вычисления требуемых параметров. Разнородность поля Рис. 1 Разнородность поля по плотности (определяется на основе качества прохождения сигнала) Как видно на цветовой карте отсканированного участка поля, выделены три типа плотности почвы, отличающихся по качеству прохождения сигнала. Прямая связь между качеством сигнала и текстурой и степенью плотности почвы позволяет предположить, что выделенные участки различаются по плотности и текстуре почвы. Сегменты наименее плотной почвы отмечены цифрой “1”. “2” - означает большую плотность, “3” - самый высокий уровень плотности относительно выбранного поля. Первичные выводы: 1. Различие в плотности почвы или в гранулометрическом составе и гидрофизических свойствах почв сегментов 1, 2 и 3. 2. Необходимость референсных замеров в нескольких точках каждого участка для точного определения типа почвы, гранулометрического состава и водоудерживающие свойства. Относительно объемное содержание влаги Рис. 2 Относительное объемное содержание влаги в почве в % Значения относительного объемного содержания влаги в почве выбранного участка находятся в диапазоне 5.8% - 8.1%, что соответствует легким песчаным почвам в классификации USDA. Карта отображает специфику накопления влаги, где при условии референсной сверки данных на основе взятия проб, 1% может соответствовать 1 мм влаги в 10 см. слое почвы (при условии проведения соответствующей сверки данных и калибровки датчиков объемного содержания влаги почвы). Такие типы почв характеризуются сравнительно низкой водоудерживающей способностью: 300/400 м3/Га доступной для растения влаги, где диапазон значений между хорошо увлажненной почвой и влажностью устойчивого завядания крайне небольшой: 4%-5%. Первичные выводы: 1. Значения относительного содержания влаги характерны для песчаных почв. 2. Наиболее увлажненными являются секции поля с с самым высоким уровнем уплотнения, соответствующим Зоне 3 (см. Рисунок 1) 3. Наиболее сухими являются секции поля с с самым низким уровнем уплотнения, соответствующим Зоне 1 (см. Рисунок 1). 4. Следует провести изучение референсных точек на предмет гранулометрического состава почвы, а также пролить данные точки для точного определения границ ППВ-НВ. Это позволит обеспечить максимально высокий контроль уровня влаги в почве на конкретных глубинах 5. В условиях подобного типа почвы базовая стратегия полива должна заключаться в частых поливах низкими нормами с частым контролем значений водного баланса. Такой контроль достигается благодаря оснащению зон мониторинга ET0 станциями и логгерами с датчиками объемного содержания влаги в почве; 6. В случае работы с влаголюбивыми культурами, чувствительными к водному стрессу, особенный акцент должен быть сделан на выборе датчиков мониторинга влажности: Обязательное оснащение системы тензиометрическими и датчиками на разных профилях активной корневой зоны; Крайне желательной оснащение датчиками объемного содержания для точного расчета водного баланса при условии их правильной калибровки и работы в связке с референсной ET0 станцией; Желательная установка на разные типы почвы по одному профильному датчику для измерения движения воды по профилю. Уровень засоления почвы Рис. 3 Электропроводность в слоях 20/40/60/80 см на выбранном участке поля. Карта концентрации солей в слоях 20-60 см (рис.3) показывают, что уровень засоления почвы является равномерно средним для песчаных почв. Градиент засоления по этим слоям постепенный с значительным переходом на глубине 80 см, где значения отображают также средний уровень концентрации солей. Первичные выводы: 1. Значения концентрации солей показывают средний уровень засоления почвы. При этом поле засолено равномерно, без значимой разницы между зонами поля с менее и более уплотненными слоями почвы. 2. Подобный уровень засоления предполагает работу с культурами с разным уровнем невосприимчивости к средней и высокой концентрации соли в почве. Глубина пахотного слоя почвы Рис. 4 Глубина пахотного слоя почвы Карта глубины пахотного слоя почвы (рис. 4) показывает, что пахотный слой довольно равномерно распределен по всему участку в 100 гектар с глубиной в пределах 12.5-13.3 сантиметра. Выводы 1. В поле выявлено три зоны с разным уровнем плотности. 2. Пахотный слой почвы равномерный в пределах 12.5-13.3 см. 3. Наличие относительного объемного содержания влаги в почве характерны для песчаных почв. Данный тип характеризуется низкой водоудерживающей способностью. Диапазон значений для данных почв между хорошо увлажненной почвой и влажностью устойчивого завядания крайне небольшой: 4%-5%. 4. Почвы средне засолены с плавным градиентом изменения концентрации на профилях 20-60 см и более сильным переходом на глубине 60-80 см. Рекомендации 1. В условиях предполагаемого типа почвы стратегия планирования полива должна предполагать частые поливы низкими нормами с детальным контролем значений водного баланса Такой контроль достигается благодаря оснащению зон мониторинга ET0 станциями и логгерами с датчиками объемного содержания влаги в почве. 2. В случае работы с влаголюбивыми культурами, чувствительными к водному стрессу, особенный акцент должен быть сделан на выборе датчиков мониторинга влажности. 3. Следует провести изучение референсных точек на предмет гранулометрического состава почвы, а также пролить данные точки для точного определения границ ППВ-НВ. Это позволит обеспечить максимально высокий контроль уровня влаги в почве на конкретных глубинах. 4. Выявленный уровень концентрации солей предполагает работу с культурами с разным уровнем невосприимчивости к средней концентрации соли в почве. 5. В случае поливных работ: Обязательное оснащение системы тензиометрическими датчиками на разных профилях активной корневой зоны. Крайне желательной оснащение датчиками объемного содержания для точного расчета водного баланса при условии их правильной калибровки и работы в связке с референсной ET0 станцией. Желательная установка на разные типы почвы по одному профильному датчику для измерения движения воды по профилю.
Отчет по сканированию поля на базе сканера почвы от Pessl InstrumentsВводные данные 14.10.2021 представителями компании Pessl Instruments и Фолворт Консультант было проведено сканирование почвы участка поля в 100 гектар (далее “ выбранный участок поля”) для решения следующих задач: 1. Определение степени разнородности/уплотненности почвы в выбранном участке 2. Определение вертикальной разнородности почвы: Определение наблюдаемой электропроводности;* Определение относительной влажности; Определение относительной засолености; Выявление неоднородностей в распределении этих параметров в горизонтальном и вертикальном разрезах. * Наблюдаемая электропроводность отличается от электропроводности, получаемой в лабораторных условиях. Для более детального изучения см. здесь. 3. Определение относительного объемного содержания влаги в почве на выбранном участке поля: Измерение относительного влагоудерживающего потенциала почвы; Выявление текущего относительного содержания объемного содержания влаги; Зонирование поля по сухим, увлажненным и переувлажненным участкам. 4. Определение относительной степени засоленности почвы на 4х почвенных профилях (0-20, 20-40, 40-60, 60-80 см). 5. Формирование рекомендаций для технического оснащения средствами мониторинга влажности почвы в соответствии с спецификой поля и потребностями культур, а также систем полива. Важно: Сканирование проводилось почвенным сканером с измерением электромагнитной индукции. Почва сканируется на глубину до 100 см, где получаемый сигнал анализируется с помощью проверенных математических моделей для вычисления требуемых параметров. Разнородность поля Рис. 1 Разнородность поля по плотности (определяется на основе качества прохождения сигнала) Как видно на цветовой карте отсканированного участка поля, выделены три типа плотности почвы, отличающихся по качеству прохождения сигнала. Прямая связь между качеством сигнала и текстурой и степенью плотности почвы позволяет предположить, что выделенные участки различаются по плотности и текстуре почвы. Сегменты наименее плотной почвы отмечены цифрой “1”. “2” - означает большую плотность, “3” - самый высокий уровень плотности относительно выбранного поля. Первичные выводы: 1. Различие в плотности почвы или в гранулометрическом составе и гидрофизических свойствах почв сегментов 1, 2 и 3. 2. Необходимость референсных замеров в нескольких точках каждого участка для точного определения типа почвы, гранулометрического состава и водоудерживающие свойства. Относительно объемное содержание влаги Рис. 2 Относительное объемное содержание влаги в почве в % Значения относительного объемного содержания влаги в почве выбранного участка находятся в диапазоне 5.8% - 8.1%, что соответствует легким песчаным почвам в классификации USDA. Карта отображает специфику накопления влаги, где при условии референсной сверки данных на основе взятия проб, 1% может соответствовать 1 мм влаги в 10 см. слое почвы (при условии проведения соответствующей сверки данных и калибровки датчиков объемного содержания влаги почвы). Такие типы почв характеризуются сравнительно низкой водоудерживающей способностью: 300/400 м3/Га доступной для растения влаги, где диапазон значений между хорошо увлажненной почвой и влажностью устойчивого завядания крайне небольшой: 4%-5%. Первичные выводы: 1. Значения относительного содержания влаги характерны для песчаных почв. 2. Наиболее увлажненными являются секции поля с с самым высоким уровнем уплотнения, соответствующим Зоне 3 (см. Рисунок 1) 3. Наиболее сухими являются секции поля с с самым низким уровнем уплотнения, соответствующим Зоне 1 (см. Рисунок 1). 4. Следует провести изучение референсных точек на предмет гранулометрического состава почвы, а также пролить данные точки для точного определения границ ППВ-НВ. Это позволит обеспечить максимально высокий контроль уровня влаги в почве на конкретных глубинах 5. В условиях подобного типа почвы базовая стратегия полива должна заключаться в частых поливах низкими нормами с частым контролем значений водного баланса. Такой контроль достигается благодаря оснащению зон мониторинга ET0 станциями и логгерами с датчиками объемного содержания влаги в почве; 6. В случае работы с влаголюбивыми культурами, чувствительными к водному стрессу, особенный акцент должен быть сделан на выборе датчиков мониторинга влажности: Обязательное оснащение системы тензиометрическими и датчиками на разных профилях активной корневой зоны; Крайне желательной оснащение датчиками объемного содержания для точного расчета водного баланса при условии их правильной калибровки и работы в связке с референсной ET0 станцией; Желательная установка на разные типы почвы по одному профильному датчику для измерения движения воды по профилю. Уровень засоления почвы Рис. 3 Электропроводность в слоях 20/40/60/80 см на выбранном участке поля. Карта концентрации солей в слоях 20-60 см (рис.3) показывают, что уровень засоления почвы является равномерно средним для песчаных почв. Градиент засоления по этим слоям постепенный с значительным переходом на глубине 80 см, где значения отображают также средний уровень концентрации солей. Первичные выводы: 1. Значения концентрации солей показывают средний уровень засоления почвы. При этом поле засолено равномерно, без значимой разницы между зонами поля с менее и более уплотненными слоями почвы. 2. Подобный уровень засоления предполагает работу с культурами с разным уровнем невосприимчивости к средней и высокой концентрации соли в почве. Глубина пахотного слоя почвы Рис. 4 Глубина пахотного слоя почвы Карта глубины пахотного слоя почвы (рис. 4) показывает, что пахотный слой довольно равномерно распределен по всему участку в 100 гектар с глубиной в пределах 12.5-13.3 сантиметра. Выводы 1. В поле выявлено три зоны с разным уровнем плотности. 2. Пахотный слой почвы равномерный в пределах 12.5-13.3 см. 3. Наличие относительного объемного содержания влаги в почве характерны для песчаных почв. Данный тип характеризуется низкой водоудерживающей способностью. Диапазон значений для данных почв между хорошо увлажненной почвой и влажностью устойчивого завядания крайне небольшой: 4%-5%. 4. Почвы средне засолены с плавным градиентом изменения концентрации на профилях 20-60 см и более сильным переходом на глубине 60-80 см. Рекомендации 1. В условиях предполагаемого типа почвы стратегия планирования полива должна предполагать частые поливы низкими нормами с детальным контролем значений водного баланса Такой контроль достигается благодаря оснащению зон мониторинга ET0 станциями и логгерами с датчиками объемного содержания влаги в почве. 2. В случае работы с влаголюбивыми культурами, чувствительными к водному стрессу, особенный акцент должен быть сделан на выборе датчиков мониторинга влажности. 3. Следует провести изучение референсных точек на предмет гранулометрического состава почвы, а также пролить данные точки для точного определения границ ППВ-НВ. Это позволит обеспечить максимально высокий контроль уровня влаги в почве на конкретных глубинах. 4. Выявленный уровень концентрации солей предполагает работу с культурами с разным уровнем невосприимчивости к средней концентрации соли в почве. 5. В случае поливных работ: Обязательное оснащение системы тензиометрическими датчиками на разных профилях активной корневой зоны. Крайне желательной оснащение датчиками объемного содержания для точного расчета водного баланса при условии их правильной калибровки и работы в связке с референсной ET0 станцией. Желательная установка на разные типы почвы по одному профильному датчику для измерения движения воды по профилю. -
 Подготовка к посевной кампанииПодготовка к посевной – важный процесс, от точности проведения которого зависит качество и объем урожая. Как показывает практика, оптимального результата удается добиться, с использованием инновационного оборудования и цифровых систем автоматизации, обеспечивающих контроль за севом в круглосуточном режиме, что позволяет снизить риск нарушений технологий или хищений. С помощью автоматического контроля, можно повысить точность учета расхода семян и оперативность решения других задач, касающихся посевных работ. Актуализация контуров полей перед посевной Использование неактуальных контуров полей зачастую приводит к тому, что часть территории не обрабатывается и не засевается. Даже при незначительном расхождении старых и фактических данных, например на 2%, получается, что на 1 тыс. га остаются необработанными 20 га. Это приводит к перерасходу семян и потери в денежном эквиваленте могут быть в диапазоне 100–300 тыс. руб. в зависимости от культуры. Особенно серьезные и необоснованные затраты несут хозяйства с большим количеством территориально разбросанных полей. Перерасход семян из-за неточных контуров полей Избежать таких результатов позволит ежегодная актуализация контуров до посевной, путем создания детальных электронных карт с отрисовкой реальных контуров полей следующими способами: по бесплатным или платным снимкам со спутника; съемкой полей с беспилотника; наземным объездом каждого поля на технике с GPS приемником. Из перечисленных вариантов, наиболее эффективным считаются первые два, так как занимают минимум времени, в отличие от наземного объезда, который может затянуться на несколько дней. Помимо этого, они являются менее затратными. Удобство первого и второго способа заключается и в том, что они имеют более высокую информативность, так как в результате, помимо контуров полей, также выгружаются сами снимки, по которым эти контура можно проверить. Планирование посевных работ с учетом метеоусловий Использование всех возможностей систем автоматизации в период подготовки к посевной позволяет точно планировать наиболее подходящее время для посева, в зависимости от метеорологических условий. При этом, не нужно собирать данные вручную по метеосайтам и специальным сервисам. Температура, влажность, скорость ветра, возможные осадки и другие показатели собираются системой автоматически с частных метеостанций и общедоступных источников. Программа не только осуществляет сбор данных, но и производит расчет метеорологических показателей, таких как накопленные осадки, среднесуточная температура и пр. В случае достижения установленных показателей метеопараметров, система может отправлять агроному оповещения. Вся информация отображается наглядными графиками и таблицей, разбитой ячейками на дни и часы за определенный период. Для того чтобы данные легко воспринимались визуально, каждой ячейке присваивается конкретный цвет, определяющий степень благоприятности или неблагоприятности проведения сева. Контроль посевных работ. Системы контроля высева. Возможности системы позволяют точно контролировать все процессы посевных работ и своевременно выявлять проблемы, напрямую влияющие на результат сева: хищения, связанные со сливами топлива, расхождением в данных техники и заправщика в момент заправки, работой на чужом поле, с воровством посевного материала; производственные нарушения, определяемые по простоям техники и нарушению скоростных режимов; агрономические, возникающие из-за перерасхода ТМЦ и отсутствия учета метеоусловий при планировании полевых работ. Из всех перечисленных проблем, чаще всего агрохолдинги и фермерские хозяйства сталкиваются с тремя проблемами: Работа на чужих полях – к этому может привести не только целенаправленное перемещение с целью подработки, но и такие факторы, как неактуальные контура полей или ошибки механизаторов. Своевременное получение данной информации позволяет быстро скорректировать работу техники и пресечь посев на чужой территории. Нарушение скоростного режима – возникает в результате несоблюдения правил эксплуатации транспорта или технологических процессов и приводит к потере до 10% урожая. Простой сельхозтехники – в качестве причины здесь может выступать как невыполнение своих обязанностей механизатором, так и технические проблемы – выход из строя транспорта или посевного оборудования. Постоянная аналитика позволяет своевременно выявлять отклонения в рабочем процессе и выводить их визуально с помощью инфографики с группировкой по определенным причинам. Дополнительно, применение цифровой системы автоматизации контроля посевов дает возможность отслеживать плотность посева и степень заглубления орудия. При этом оборудование для анализа этих параметров состоит из небольшого количества составляющих, поэтому требует минимум времени для монтажа и настройки. Норма высева и возникающие неполадки оборудования отображаются на информативном мониторе гистограммой, оповещающей о: уровне посевного материала, оставшегося в бункере; засорении сошников; степени заглубления орудия сеялки; отклонении или соблюдении нормы высева. Все показатели пересылаются на сервер в режиме реального времени, что позволяет быстро принять решение для исправления отклонений в работе и формировать отчеты с учетом выполненных или запланированных операций. Анализ качества проведенных посевных работ Оперативный сбор и систематизация данных позволяют проводить детальный анализ качества всех осуществляемых работ, и своевременно выявлять: перекрытия посева; фактически отработанную площадь; трек передвижения техники по полю; пропуски. Особое значение для анализа работ и посевов имеет использование беспилотников, которые дают возможность оценить всхожесть, количество пропусков, двойников и расстояние между всходами в кратчайшие сроки.
Подготовка к посевной кампанииПодготовка к посевной – важный процесс, от точности проведения которого зависит качество и объем урожая. Как показывает практика, оптимального результата удается добиться, с использованием инновационного оборудования и цифровых систем автоматизации, обеспечивающих контроль за севом в круглосуточном режиме, что позволяет снизить риск нарушений технологий или хищений. С помощью автоматического контроля, можно повысить точность учета расхода семян и оперативность решения других задач, касающихся посевных работ. Актуализация контуров полей перед посевной Использование неактуальных контуров полей зачастую приводит к тому, что часть территории не обрабатывается и не засевается. Даже при незначительном расхождении старых и фактических данных, например на 2%, получается, что на 1 тыс. га остаются необработанными 20 га. Это приводит к перерасходу семян и потери в денежном эквиваленте могут быть в диапазоне 100–300 тыс. руб. в зависимости от культуры. Особенно серьезные и необоснованные затраты несут хозяйства с большим количеством территориально разбросанных полей. Перерасход семян из-за неточных контуров полей Избежать таких результатов позволит ежегодная актуализация контуров до посевной, путем создания детальных электронных карт с отрисовкой реальных контуров полей следующими способами: по бесплатным или платным снимкам со спутника; съемкой полей с беспилотника; наземным объездом каждого поля на технике с GPS приемником. Из перечисленных вариантов, наиболее эффективным считаются первые два, так как занимают минимум времени, в отличие от наземного объезда, который может затянуться на несколько дней. Помимо этого, они являются менее затратными. Удобство первого и второго способа заключается и в том, что они имеют более высокую информативность, так как в результате, помимо контуров полей, также выгружаются сами снимки, по которым эти контура можно проверить. Планирование посевных работ с учетом метеоусловий Использование всех возможностей систем автоматизации в период подготовки к посевной позволяет точно планировать наиболее подходящее время для посева, в зависимости от метеорологических условий. При этом, не нужно собирать данные вручную по метеосайтам и специальным сервисам. Температура, влажность, скорость ветра, возможные осадки и другие показатели собираются системой автоматически с частных метеостанций и общедоступных источников. Программа не только осуществляет сбор данных, но и производит расчет метеорологических показателей, таких как накопленные осадки, среднесуточная температура и пр. В случае достижения установленных показателей метеопараметров, система может отправлять агроному оповещения. Вся информация отображается наглядными графиками и таблицей, разбитой ячейками на дни и часы за определенный период. Для того чтобы данные легко воспринимались визуально, каждой ячейке присваивается конкретный цвет, определяющий степень благоприятности или неблагоприятности проведения сева. Контроль посевных работ. Системы контроля высева. Возможности системы позволяют точно контролировать все процессы посевных работ и своевременно выявлять проблемы, напрямую влияющие на результат сева: хищения, связанные со сливами топлива, расхождением в данных техники и заправщика в момент заправки, работой на чужом поле, с воровством посевного материала; производственные нарушения, определяемые по простоям техники и нарушению скоростных режимов; агрономические, возникающие из-за перерасхода ТМЦ и отсутствия учета метеоусловий при планировании полевых работ. Из всех перечисленных проблем, чаще всего агрохолдинги и фермерские хозяйства сталкиваются с тремя проблемами: Работа на чужих полях – к этому может привести не только целенаправленное перемещение с целью подработки, но и такие факторы, как неактуальные контура полей или ошибки механизаторов. Своевременное получение данной информации позволяет быстро скорректировать работу техники и пресечь посев на чужой территории. Нарушение скоростного режима – возникает в результате несоблюдения правил эксплуатации транспорта или технологических процессов и приводит к потере до 10% урожая. Простой сельхозтехники – в качестве причины здесь может выступать как невыполнение своих обязанностей механизатором, так и технические проблемы – выход из строя транспорта или посевного оборудования. Постоянная аналитика позволяет своевременно выявлять отклонения в рабочем процессе и выводить их визуально с помощью инфографики с группировкой по определенным причинам. Дополнительно, применение цифровой системы автоматизации контроля посевов дает возможность отслеживать плотность посева и степень заглубления орудия. При этом оборудование для анализа этих параметров состоит из небольшого количества составляющих, поэтому требует минимум времени для монтажа и настройки. Норма высева и возникающие неполадки оборудования отображаются на информативном мониторе гистограммой, оповещающей о: уровне посевного материала, оставшегося в бункере; засорении сошников; степени заглубления орудия сеялки; отклонении или соблюдении нормы высева. Все показатели пересылаются на сервер в режиме реального времени, что позволяет быстро принять решение для исправления отклонений в работе и формировать отчеты с учетом выполненных или запланированных операций. Анализ качества проведенных посевных работ Оперативный сбор и систематизация данных позволяют проводить детальный анализ качества всех осуществляемых работ, и своевременно выявлять: перекрытия посева; фактически отработанную площадь; трек передвижения техники по полю; пропуски. Особое значение для анализа работ и посевов имеет использование беспилотников, которые дают возможность оценить всхожесть, количество пропусков, двойников и расстояние между всходами в кратчайшие сроки.
Консультация
По всем возникающим вопросамВы можете проконсультироваться
с нашими специалистами по телефону
+7 (495) 788 59 56
Звонок абсолютно бесплатный
для всех регионов РФ!
для всех регионов РФ!


